14 运筹帷幄,伺机而动:Tokio异步运行时(下)
你好,我是鸟窝。
这节课我们继续学习Tokio异步运行时的其他知识,包括任务、宏和信号。
任务(Task)
任务是一种轻量级、非阻塞的执行单元,类似于操作系统线程,但它们不是由操作系统调度器管理的,而是由 Tokio 运行时管理的。这种通用模式的另一个名称是绿色线程。如果你熟悉 Go 的 Goroutine、Kotlin 的协程或 Erlang 的进程,你就可以将 Tokio 的任务视为类似的东西。
关于任务的关键点包括:
- 任务是轻量级的。由于任务由 Tokio 运行时而不是操作系统调度,因此创建新任务或在任务之间切换不需要上下文切换,并且开销相当低。创建、运行和销毁大量任务非常廉价,尤其是与操作系统线程相比。
- 任务是协作调度的。大多数操作系统都实现抢占式多任务处理。这是一种调度技术,操作系统允许每个线程运行一段时间,然后抢占它,暂时暂停该线程并切换到另一个线程。另一方面,任务实现协作式多任务处理。在协作式多任务处理中,允许一个任务运行直到它让出,向 Tokio 运行时的调度器表明它目前无法继续执行。当一个任务让出时,Tokio 运行时会切换到执行下一个任务。
- 任务是非阻塞的。通常,当一个操作系统线程执行 I/O 或必须与其他线程同步时,它会阻塞,允许操作系统调度另一个线程。当一个任务无法继续执行时,它必须让出,从而允许 Tokio 运行时调度另一个任务。任务通常不应执行可能阻塞线程的系统调用或其他操作,因为这将阻止在同一线程上运行的其他任务的执行。不过这部分我们提供了在异步上下文中运行阻塞操作的 API。
创建任务
spawn
如果我们要创建任务,我们最需要了解的函数就是 task::spawn。你可以将其视为标准库中的 thread::spawn 的异步等效项。它接受一个异步块或其他 future,并创建一个新任务来并发地运行该工作:
与 std::thread::spawn 类似,task::spawn 返回一个 JoinHandle 结构体。JoinHandle 本身是一个 future,可用于等待已生成任务的输出。例如:
use tokio::task;
let join = task::spawn(async {
// ...
"hello world!"
});
// ...
// 等待已生成任务的结果。
let result = join.await?;
assert_eq!(result, "hello world!");
同样,类似于 std::thread 的 JoinHandle 类型,如果生成的 task 发生恐慌,则等待其 JoinHandle 将返回一个 JoinError。例如:
use tokio::task;
let join = task::spawn(async {
panic!("发生了不好的事情!");
});
// 返回的结果表明任务失败。
assert!(join.await.is_err());
spawn_blocking
通常,在 future 中发出阻塞调用或执行大量计算而不让出控制权是有问题的,因为它可能阻止执行器驱动其他 future 前进。此函数在一个专用于阻塞操作的线程上运行提供的闭包。
Tokio 将在通过此函数请求时生成更多阻塞线程,直到达到在 Builder 上配置的上限。达到上限后,任务将放入队列。默认情况下,线程限制非常大,因为 spawn_blocking 通常用于各种无法异步执行的 IO 操作。当使用 spawn_blocking 运行 CPU 密集型代码时,应牢记这个较大的上限。当运行许多 CPU 密集型计算时,应使用信号量或其他同步原语来限制并行执行的计算数量。专门的 CPU 密集型执行器,例如 rayon,也可能是一个不错的选择。
此函数旨在用于最终自行完成的非异步操作。如果要生成一个普通线程,则应改用 thread::spawn。
let result = task::spawn_blocking(move || {
thread::sleep(Duration::from_secs(2));
return 200
})
.await
.unwrap();
println!("Result: {}", result); // 输出 20
在这段代码中,我们使用了 Tokio 库中的 task::spawn_blocking 函数来在单独的线程中运行一个阻塞操作。
请注意,使用 spawn_blocking 生成的任务无法中止,因为它们不是异步的。如果在 spawn_blocking 任务上调用 abort,则不会有任何效果,并且该任务将继续正常运行。例外情况是任务尚未开始运行;在这种情况下,调用 abort 可能会阻止任务启动。
关闭执行器时,它将无限期地等待所有阻塞操作完成。你可以使用 shutdown_timeout 在一定超时后停止等待它们。注意,这仍然不会取消任务——它们只是在方法返回后被允许继续运行。如果阻塞任务尚未开始运行,则有可能将其取消,但这不能保证。
请注意,如果你使用的是单线程运行时,此函数仍将为阻塞操作生成额外的线程。当前线程调度器的单线程仅用于异步代码。
spawn_local
在当前的 LocalSet 或 LocalRuntime 上生成一个 !Send 的 future。生成的 future 将在调用 spawn_local 的同一个线程上运行。提供的 future 将在调用 spawn_local 时立即在后台开始运行,即使你不 await 返回的 JoinHandle。
let nonsend_data = Rc::new("my nonsend data...");
// 创建了一个新的 LocalSet,它是一个任务集合,
// 保证这些任务在同一个线程上运行。
// 这对于需要访问非线程安全数据的任务非常有用。
let local = task::LocalSet::new();
// 使用 run_until 方法运行本地任务集,
// 直到提供的异步任务完成。在这个异步任务中,
// 首先克隆了 nonsend_data,以确保每个任务都有自己的数据引用。
local
.run_until(async move {
let nonsend_data = nonsend_data.clone();
// 使用 task::spawn_local 生成一个新的本地任务。
// 这个函数类似于 tokio::spawn,
// 但它确保任务在与 LocalSet 相同的线程上运行。
// 在这个任务中,打印了 nonsend_data 的内容。
// await 和 unwrap 确保等待任务完成
task::spawn_local(async move {
println!("{}", nonsend_data);
// ...
})
.await
.unwrap();
})
.await;
LocalSet
一组在同一线程上执行的任务。在某些情况下,需要运行一个或多个未实现 Send trait 的 future,因此在线程之间发送它们是不安全的。在这些情况下,可以使用本地任务集来调度一个或多个 !Send 的 future 在同一线程上一起运行。例如,以下代码将无法编译:
use std::rc::Rc;
#[tokio::main]
async fn main() {
// `Rc` 非线程安全.
let nonsend_data = Rc::new("my nonsend data...");
let nonsend_data = nonsend_data.clone();
// 此处 `async` 块移动了nonsend_data,所以future是`!Send`,
// 又因为`tokio::spawn`需要此future实现`Send`,导致编译失败
tokio::spawn(async move {
println!("{}", nonsend_data);
// ...
}).await.unwrap();
}
为了启动 !Send 的 future,我们可以使用本地任务集在调用 Runtime::block_on 的线程上调度它们。在本地任务集内部运行时,我们可以使用 task::spawn_local,它可以启动 !Send 的 future。例如:
let nonsend_data = Rc::new("my nonsend data...");
// 创建了一个新的 LocalSet,它是一个任务集合,
// 保证这些任务在同一个线程上运行。
// 这对于需要访问非线程安全数据的任务非常有用。
let local = task::LocalSet::new();
// 使用 run_until 方法运行本地任务集,
// 直到提供的异步任务完成。在这个异步任务中,
// 首先克隆了 nonsend_data,以确保每个任务都有自己的数据引用。
local
.run_until(async move {
let nonsend_data = nonsend_data.clone();
// 使用 task::spawn_local 生成一个新的本地任务。
// 这个函数类似于 tokio::spawn,
// 但它确保任务在与 LocalSet 相同的线程上运行。
// 在这个任务中,打印了 nonsend_data 的内容。
// await 和 unwrap 确保等待任务完成
task::spawn_local(async move {
println!("{}", nonsend_data);
// ...
})
.await
.unwrap();
})
.await;
这个例子我们上面介绍 spawn_local 的时候已经介绍过了。
JoinSet
JoinSet代表一组在 Tokio 运行时中创建的任务集合。我们可以使用 JoinSet 等待集合中部分或全部任务的完成。这个集合是无序的,任务会按照它们完成的先后顺序返回。所有任务的返回值类型 T 必须相同。当 JoinSet 被丢弃时,其中包含的所有任务都会立即中止。
下面是一个使用 JoinSet 的例子:
use tokio::task::JoinSet;
#[tokio::main]
async fn main() {
let mut set = JoinSet::new();
for i in 0..10 {
set.spawn(async move { i });
}
let mut seen = [false; 10];
while let Some(res) = set.join_next().await {
let idx = res.unwrap();
seen[idx] = true;
}
for i in 0..10 {
assert!(seen[i]);
}
}
这段代码展示了如何使用 Tokio 库中的 JoinSet 来并发地运行多个异步任务,并收集它们的结果。
- 使用 for 循环生成 10 个异步任务,每个任务简单地返回其索引 i。这些任务被添加到
JoinSet中进行管理。 - 创建一个布尔数组
seen,用于跟踪每个任务的结果是否已被处理。使用while let循环异步地等待并收集JoinSet中下一个完成的任务结果。res.unwrap()提取任务的结果,并将对应索引的seen值设置为 true。 - 使用
for循环验证所有任务的结果都已被处理。如果所有任务都成功完成并且结果被正确收集,程序将正常结束;否则,断言将失败并引发错误。
JoinSet 有一堆方法, join系列包括 join_all、join_next、join_next_with_id,等待任务全部完成或者逐个按照顺序检查任务是否完成,还有 try_join_next 和 try_join_with_id。abort_all 终止此集合内所有的任务。poll_join_next 和 poll_join_next_with_id 提供异步的功能。一系列 l 类 spawn 方法提供执行任务的能力。detach_all 移除所有的任务。is_empty 检查集合是否为空,len 返回集合中任务的数量。shutdown 终止所有的任务并等待它们完成终止动作,等价于 abort_all + 在循环中 join_next。
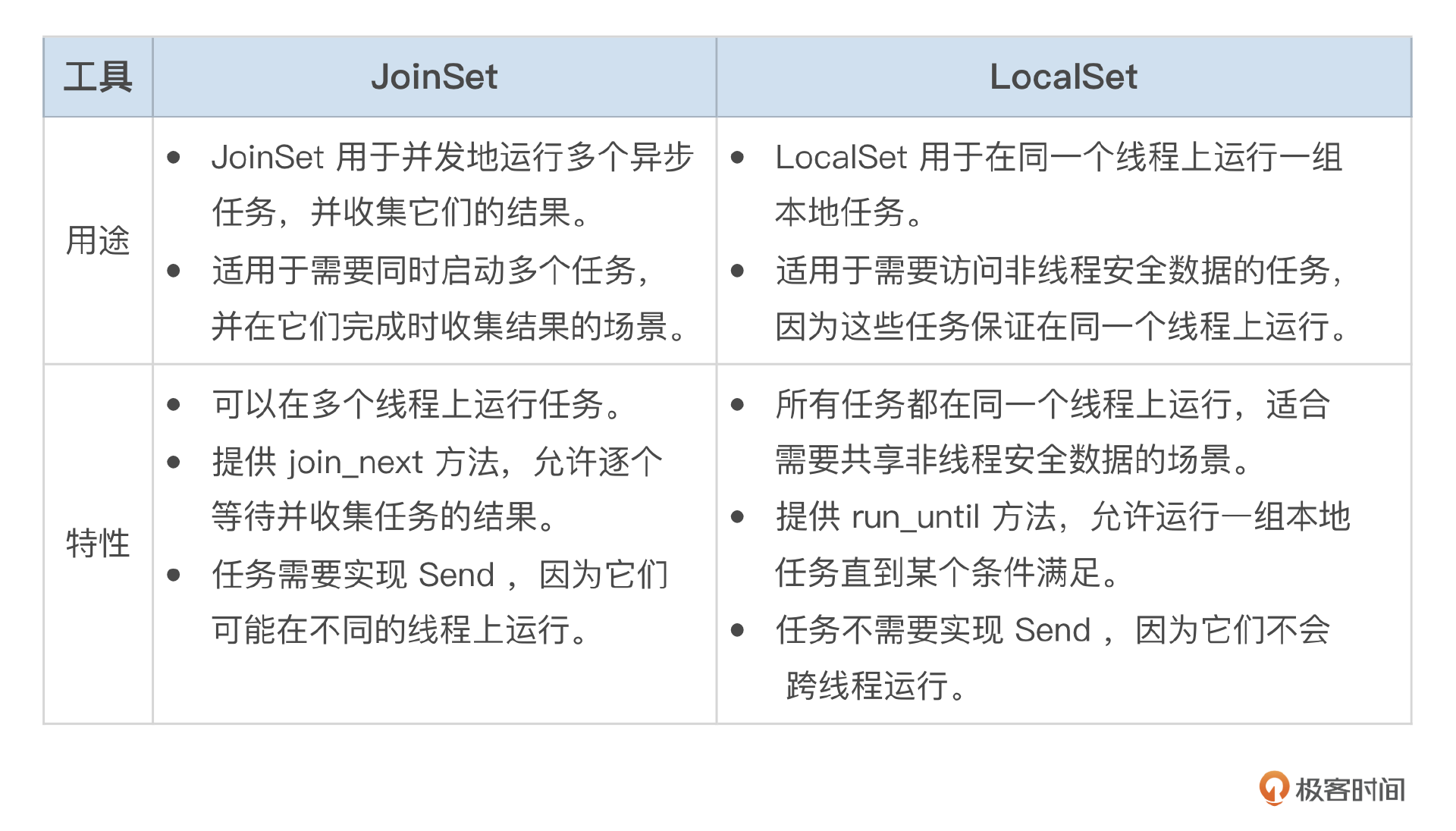
JoinSet 和 LocalSet 都是 Tokio 提供的用于管理异步任务的工具,但它们有不同的用途和特性。以下是它们的主要区别:
取消
可以使用 JoinHandle::abort 或 AbortHandle::abort 方法取消已生成的任务。当调用这些方法之一时,任务会被告知在下次 .await 点检查时让出控制权时关闭。如果任务已经处于空闲状态,则会尽快关闭,而不会在它被正式关闭前再次运行。此外,关闭 Tokio 运行时(例如,通过从 #[tokio::main] 返回)会立即取消其上的所有任务。
当 task 关闭时,它将在其所产出的任何 .await 处停止运行。所有局部变量都将通过运行其析构函数而被销毁。关闭完成后,等待 JoinHandle 将失败并出现取消错误。
请注意,中止 task 并不保证它会因取消错误而失败,因为它可能首先正常完成。例如,如果 task 在调用 abort 和 task 结束之间没有在任何时候产出到运行时,则 JoinHandle 将改为报告 task 正常退出。
注意,对 JoinHandle::abort 的调用只是将 task 排入取消计划,并且将在取消完成之前返回。如果想要确保任务被完全取消,你需要使用 JoinHandle 等待它真正完成。同样,JoinHandle::is_finished 方法只有在取消完成之后才会返回 true。此外,多次调用 JoinHandle::abort 与调用一次的效果相同。
Tokio 还提供了一个 AbortHandle,它类似于 JoinHandle,但它不提供等待 task 完成的机制。每个 task 只能有一个 JoinHandle,但它可以有多个 AbortHandle。
阻塞和让出(Yield)
如上所述,在异步任务中运行的代码不应执行可能阻塞的操作。如果在运行其他任务的线程上执行阻塞操作,会阻塞整个线程,进而影响其他任务的运行。不过,Tokio 提供了两个用于在异步上下文中运行阻塞操作的 API:task::spawn_blocking 和 task::block_in_place。
请注意,如果你从异步代码中调用非异步方法,那么该非异步方法仍位于异步上下文中,因此你也应避免在其中进行阻塞操作。这包括在异步代码中销毁的对象的析构函数。
spawn_blocking
task::spawn_blocking 函数类似于刚刚讨论的 task::spawn 函数,但它不是在 Tokio 运行时生成一个非阻塞 future,而是在专用的阻塞任务线程池上生成一个阻塞函数。例如:
就像 task::spawn 一样,task::spawn_blocking 返回一个 JoinHandle,我们可以用它来等待阻塞操作的结果:
let join = task::spawn_blocking(|| {
// 执行一些计算密集型工作或调用同步代码
"blocking completed"
});
let result = join.await?;
assert_eq!(result, "blocking completed");
block_in_place
当使用多线程运行时,task::block_in_place 函数也可用。与 task::spawn_blocking 类似,此函数允许从异步上下文中运行阻塞操作。然而,与 spawn_blocking 不同的是,block_in_place 通过将当前工作线程转换为阻塞线程来工作,并将该线程上运行的其他任务移至另一个工作线程。这可以通过避免上下文切换来提高性能。例如:
use tokio::task;
let result = task::block_in_place(|| {
// 执行一些计算密集型工作或调用同步代码
"blocking completed"
});
assert_eq!(result, "blocking completed");
yield_now
此外,该模块提供了一个 task::yield_now 异步函数,类似于标准库的 thread::yield_now。调用和等待此函数将导致当前任务产出到 Tokio 运行时的调度程序,从而允许调度其他任务。最终,产出任务将再次被轮询,允许它执行。例如:
use tokio::task;
async {
task::spawn(async {
// ...
println!("spawned task done!")
});
// 产出,允许新生成的 task 首先执行。
task::yield_now().await;
println!("main task done!");
}
协作式调度
当对顶层任务调用 poll 时,它可能在返回 Poll::Pending 之前执行大量工作。如果一个任务长时间运行而不让出控制权给执行器,它可能会饿死其他等待该执行器执行的任务,或者耗尽底层资源。由于 Rust 没有运行时环境,因此很难强制抢占长时间运行的任务。相反,这个模块提供了一种可选的机制,让协程与执行器协作,避免饿死问题。
我们来看这样一个协程:
乍一看似乎没什么问题,但如果输入流总是准备好数据,并且负载很高,会发生什么呢?如果我们启动 drop_all,这个任务将永远不会让出控制权,并饿死其他在同一个执行器上运行的任务,也会耗尽资源。为了解决这个问题,Tokio 在许多库函数中引入了显式的让步点,迫使任务定期返回给执行器。
显式让步点是一种重要的技术,用于在协作式调度的异步环境中防止任务饥饿。通过在长时间运行的任务中插入让步点,我们可以确保其他任务也能得到执行,提高程序的并发性和响应性。在 Tokio 中,我们可以使用 tokio::task::yield_now() 来实现显式让步。
除了 tokio::task::yield_now(),一些 I/O 操作或其他异步操作本身就包含隐式的让步点。例如,当一个任务等待网络数据时,它会自动让出控制权。
另外,如果需要,可以使用 task::unconstrained 将 future 排除在 Tokio 的协作式调度之外。一旦 future 被 unconstrained 包裹,它将不再受 Tokio 的强制让步机制约束。例如:
use tokio::{task, sync::mpsc};
let fut = async {
let (tx, mut rx) = mpsc::unbounded_channel();
for i in 0..1000 {
let _ = tx.send(());
// 不会被强制yield
rx.recv().await;
}
};
task::unconstrained(fut).await; // 此future不受约束
那些宏
join/try_join
join! 宏等待多个并发分支,直到所有分支都完成后才返回。它必须在异步函数、闭包或代码块内部使用。join! 宏接收一系列异步表达式,并在同一个任务中并发执行它们。每个异步表达式都会求值为一个 future,这些 future 会在当前任务中进行多路复用。
当处理返回 Result 的异步表达式时,无论是否有分支返回 Err,join! 都会等待所有分支完成。如果希望在遇到 Err 时立即返回,需要使用 try_join!。
下面是一个简单使用 join! 的例子,它会等待两个任务都完成:
use tokio::join;
async fn do_stuff_async() -> i32 {
println!("do stuff");
1
}
async fn more_async_work() -> &'static str {
println!("more work");
"hello join"
}
#[tokio::main]
async fn main() {
let (first, second) = join!(
do_stuff_async(),
more_async_work());
println!("first: {}, second: {}", first, second);
}
与 join! 类似,try_join! 宏也接收一系列异步表达式,并在同一个任务中并发执行它们。每个异步表达式都会求值为一个 future,这些 future 会在当前任务中进行多路复用。try_join! 宏会在所有分支都返回 Ok 时返回,或者在第一个分支返回 Err 时立即返回。
下面这个例子中其中一个任务返回Err,所以 try_join! 宏收到后立即返回,不会再等另外一个任务完成:
async fn do_stuff_async() -> Result<(), &'static str> {
std::thread::sleep(std::time::Duration::from_secs(1));
Ok(())
}
async fn more_async_work() -> Result<(), &'static str> {
Err("more work failed")
}
#[tokio::main]
async fn main() {
let res = tokio::try_join!(
do_stuff_async(),
more_async_work());
match res {
Ok((first, second)) => {
println!("first: {:?}, second: {:?}", first, second);
}
Err(err) => {
println!("processing failed; error = {}", err);
}
}
}
pin
pin! 宏将一个值固定在栈上。调用 async fn 会返回匿名的 Future 值,这些值没有实现 Unpin 特性。这些值在被轮询之前必须先固定(pin)。调用 .await 会自动处理这个过程,但会消耗掉 future 的所有权。如果需要在 &mut _ 引用上调用 .await,那么调用者需要负责手动固定 future。可以使用 Box::pin 在堆上分配并固定,或者使用 pin! 宏在栈上固定。
下面的代码将无法通过编译:
async fn my_async_fn() {
// async logic here
}
#[tokio::main]
async fn main() {
let mut future = my_async_fn();
(&mut future).await;
}
稍微修改一下就可以编译了:
use tokio::pin;
async fn my_async_fn() {
// async logic here
}
#[tokio::main]
async fn main() {
let future = my_async_fn();
pin!(future);
(&mut future).await;
}
在使用 select! 宏以及需要 T: Stream + Unpin 的流操作时,固定(pinning)就显得尤为重要,比如下面的代码,必须使用 pin 才能编译:
use tokio::{pin, select};
async fn my_async_fn() {
println!("my_async_fn");
}
#[tokio::main]
async fn main() {
pin! {
let future1 = my_async_fn();
let future2 = my_async_fn();
}
select! {
_ = &mut future1 => {}
_ = &mut future2 => {}
}
}
select
select! 宏等待多个并发分支,并在第一个分支完成后返回,取消其余分支。有点像Go语言的select语句。select! 宏必须在异步函数、闭包和代码块内部使用。
select! 宏接受一个或多个分支,其模式如下:
此外,select! 宏可以包含一个可选的 else 分支,如果其他分支都不匹配其模式,则执行该分支:else => <expression>。
该宏聚合所有 <async expression> 表达式,并在当前任务上并发运行它们。一旦第一个表达式完成并返回一个与其 <pattern> 匹配的值,select! 宏将返回执行已完成分支的 <handler> 表达式的结果。
此外,每个分支可以包含一个可选的 if 先决条件。如果先决条件返回 false,那么该分支将被禁用。提供的 <异步表达式> 仍然会被求值,但生成的结果 future 永远不会被轮询。当在循环中使用 select! 时,这个功能很有用。
select! 表达式的完整生命周期如下:
- 计算所有提供的
<precondition>表达式。如果先决条件返回false,那么在当前select!调用的剩余时间内禁用该分支。由于循环而重新进入select!会清除“禁用”状态。 - 聚合每个分支的
<async expression>,包括被禁用的分支。如果分支被禁用,<async expression>仍然会被求值,但生成的结果 future 不会被轮询。 - 如果所有分支都被禁用,转到步骤 6。
- 并发等待所有剩余的
<异步表达式>的结果。 - 一旦一个
<async expression>返回一个值,就尝试把这个值应用于提供的<pattern>。如果模式匹配,就计算<handler>并返回。如果模式不匹配,就在当前select!调用的剩余时间内禁用当前分支。从步骤 3 继续。 - 计算
else表达式。如果没有提供else表达式,则 panic。
注意第6条,我们写代码的时候尽量加上 else 表达式,否则有可能panic。如果所有分支都被禁用且没有提供 else 分支,则 select! 宏会 panic。当提供的 if 先决条件返回 false,或者当模式与 <async expression> 的结果不匹配时,分支会被禁用。
如果你还是不太理解,我打一个比喻。
想象你是一家餐厅的服务员,你同时要服务好几桌客人(每个客人代表一个“分支”)。
select!的作用:就像你同时关注着所有客人,一旦其中一位客人(第一个完成的“分支”)点好了菜,你就立刻去厨房下单,而不再理会其他还在犹豫的客人(取消其余分支)。select!的使用场景:你必须在餐厅工作时(异步函数、闭包和代码块内部)才能使用这种服务方式。select!的语法:
<模式> = <点菜请求> (, if <特殊要求>)? => <去厨房下单><点菜请求>:客人点了什么菜(异步表达式)。
<特殊要求>:客人是否有特殊要求,比如“不要辣”(先决条件)。
<去厨房下单>:你去厨房下单的动作(处理程序)。
else => <实在没人点菜就休息>:如果所有客人都没点菜,你就可以休息一下(else 分支)。
举个例子:
简单来说,select! 就像一个高效的调度员,它能让你同时处理多个任务,并在第一个任务完成后立即作出响应,而忽略其他未完成的任务。它还提供了一些额外的功能,比如根据条件选择执行哪些任务,以及在所有任务都无法执行时执行一些默认的操作。
把所有异步操作都放在当前的任务里跑,它们可以同时进行,但不是一起进行。意思是说,这些操作其实是在同一个线程上轮流执行的,如果其中一个操作卡住了,整个线程就都动不了了,其他操作也就没法继续。如果真的需要同时跑多个操作,那就用 tokio::spawn 为每个异步操作创建一个新的任务,然后把这些任务的“句柄”(join handle)交给 select! 去管理。
公平性
select! 默认会随机挑一个分支先看看。如果你在循环里用 select!,而且这些分支总是准备好的状态,那这种随机挑选的方式就能保证相对的公平。
如果你想自己控制挑选的顺序,可以在 select! 的开头加上 biased;。具体怎么用可以看下面我给出的例子。加了这个之后,select 就会按照你代码里的分支从上到下的顺序一个一个地去检查。你需要这样做的原因有几个:
tokio::select!用到的随机数生成也是要消耗 CPU 资源的。- 你的 future 之间可能会有相互影响,这时候固定的检查顺序就很重要了。
但是用这种方式有个很重要的坑要注意。你得自己保证检查 future 的顺序是公平的。举个例子,你要在一个数据流和一个关闭信号之间做选择。如果这个数据流消息特别多,而且消息之间几乎没有间隔,那你最好把关闭信号放在 select! 列表的最前面,这样才能保证它不会因为数据流一直有数据而一直被忽略,确保它能被检查到。
下面是一个使用 biased; 的例子,可以看到分支顺序执行,否则assert_eq就会失败:
#[tokio::main]
async fn main() {
let mut count = 0u8;
loop {
tokio::select! {
// 如果你在没有`biased;` 的情况下运行这个例子,轮询顺序是伪随机的,
// 并且对 count 值的断言(可能)会失败。
biased;
_ = async {}, if count < 1 => {
count += 1;
assert_eq!(count, 1);
}
_ = async {}, if count < 2 => {
count += 1;
assert_eq!(count, 2);
}
_ = async {}, if count < 3 => {
count += 1;
assert_eq!(count, 3);
}
_ = async {}, if count < 4 => {
count += 1;
assert_eq!(count, 4);
}
else => {
break;
}
};
}
}
接下来我们再学习最后一个宏。
task_local
这个宏能把一堆静态变量打包,生成一个LocalKey,让它们只在当前任务里用。原来的访问权限和属性都还在。比如:
和 std::thread::LocalKey 不一样,tokio::task::LocalKey 不是等到真正要用的时候才创建数据,而是包含它的那个future第一次被 Tokio 这种“调度员”(执行器)安排干活的时候,数据就准备好了。
例子如下:
tokio::task_local! {
static NUMBER: u32;
}
NUMBER.scope(1, async move {
assert_eq!(NUMBER.get(), 1);
}).await;
NUMBER.scope(2, async move {
assert_eq!(NUMBER.get(), 2);
NUMBER.scope(3, async move {
assert_eq!(NUMBER.get(), 3);
}).await;
}).await;
其中 scope 把值 T 设置成 future F 的任务本地值。
scope 执行完之后,这个任务本地值就会被清理掉。
#[tokio::main]
async fn main() {
tokio::task_local! {
static NUMBER: u32;
}
NUMBER.scope(1, async move {
println!("task local value: {}", NUMBER.get());
}).await;
NUMBER.scope(2, async move {
println!("task local value: {}", NUMBER.get());
}).await;
NUMBER.sync_scope(3, || {
println!("task local value: {}", NUMBER.get());
});
}
每个任务都获取到自己的本地值。
signal
signal 用于 Tokio 的异步信号处理。需要注意的是,信号处理通常非常复杂,使用时务必谨慎。这个 crate 致力于实现信号处理的“最佳实践”,但仍需根据你的应用程序需求进行评估,以确保其适用性。此外,在各个操作系统的特定结构文档中也记录了这个 crate 的一些根本性限制。
下面这个例子演示了程序接收到 ctrl+c 打印一条日志后退出:
use tokio::signal;
#[tokio::main]
async fn main() -> Result<(), Box<dyn std::error::Error>> {
signal::ctrl_c().await?;
println!("ctrl-c received!");
Ok(())
}
它还可以监听Linux信号,如下面的例子:
use tokio::signal;
use tokio::signal::unix::{signal, SignalKind};
#[tokio::main]
async fn main() -> Result<(), Box<dyn std::error::Error>> {
let mut interrupt_signal = signal(SignalKind::interrupt())?;
let mut terminate_signal = signal(SignalKind::terminate())?;
let mut hangup_signal = signal(SignalKind::hangup())?;
tokio::select! {
_ = signal::ctrl_c() => {},
_ = interrupt_signal.recv() => {},
_ = terminate_signal.recv() => {},
_ = hangup_signal.recv() => {},
}
println!("exit");
Ok(())
}
第7~9行代码分别创建了处理 SIGINT(中断信号)、SIGTERM(终止信号)和 SIGHUP(挂起信号)的信号处理器,并使用 select! 宏等待任意一个信号(还包括 ctrl+c)。
思来想去,Tokio的内容还是太多了,后续我再专门出一篇,介绍Tokio的其他的模块,比如fs、io、net、process、sync和time, 这一节还是重点介绍运行时的知识。
总结
好了,本节课我们主要介绍了 Rust 中最重要的异步运行时 Tokio剩余的知识。
Tokio 运行时使用任务(Task)进行并发操作的管理。任务是轻量级、非阻塞的,由 Tokio 运行时调度。Tokio 提供了多种创建任务的方法:
task::spawn用于创建普通任务。task::spawn_blocking用于在单独的线程中运行阻塞操作。task::spawn_local用于在同一个线程上运行非Send的 future。
Tokio 还提供了 LocalSet 和 JoinSet 用于管理任务集合。LocalSet 用于在同一线程运行任务,而 JoinSet 用于并发运行多个任务并收集结果。
为了防止任务长时间占用线程导致其他任务无法执行,Tokio 实现了协作式调度,并提供了 task::yield_now 方法让任务主动让出 CPU。也可以使用 task::unconstrained 使 future 不受 Tokio 的协作式调度约束。
Tokio 还提供了一些宏来简化异步编程:
join!和try_join!用于等待多个 future 完成。pin!用于将 future 固定在栈上。select!用于等待多个 future 中第一个完成的 future。可以使用biased;控制轮询顺序。task_local!用于创建任务本地变量。
最后简单提到了 signal 模块用于异步信号处理。
思考题
请你使用Tokio启动四个任务,分别计算一加到一百万,然后打印出结果,最后使用join!宏等待任务都完成。
欢迎你把你动手的结果分享到留言区,我们一起交流讨论,如果你身边有对异步运行时Tokio感兴趣的朋友,欢迎邀他一起学习,我们下节课再见!