05 逻辑功能开发:网络层Server端如何选型?
本课程为精品小课,不标配音频
你好,我是文强。
前面我们完成了项目初始化和基础模块的开发,这节课我们正式进入逻辑功能部分的开发。我们第一个要做的就是网络 Server 模块。
开发网络 Server 模块的核心是:从业务需求视角出发,分析 Server 应该具备哪些能力,从而根据这些信息选型出技术层面网络层和应用层的协议。
前面我们讲到,第一阶段我们会完成消息队列中的“元数据服务”,那么接下来我们就来看一下这个元数据存储服务的网络 Server 怎么选型。
网络 Server 模块选型
先来看一下元数据服务(Placement Center)的架构图。
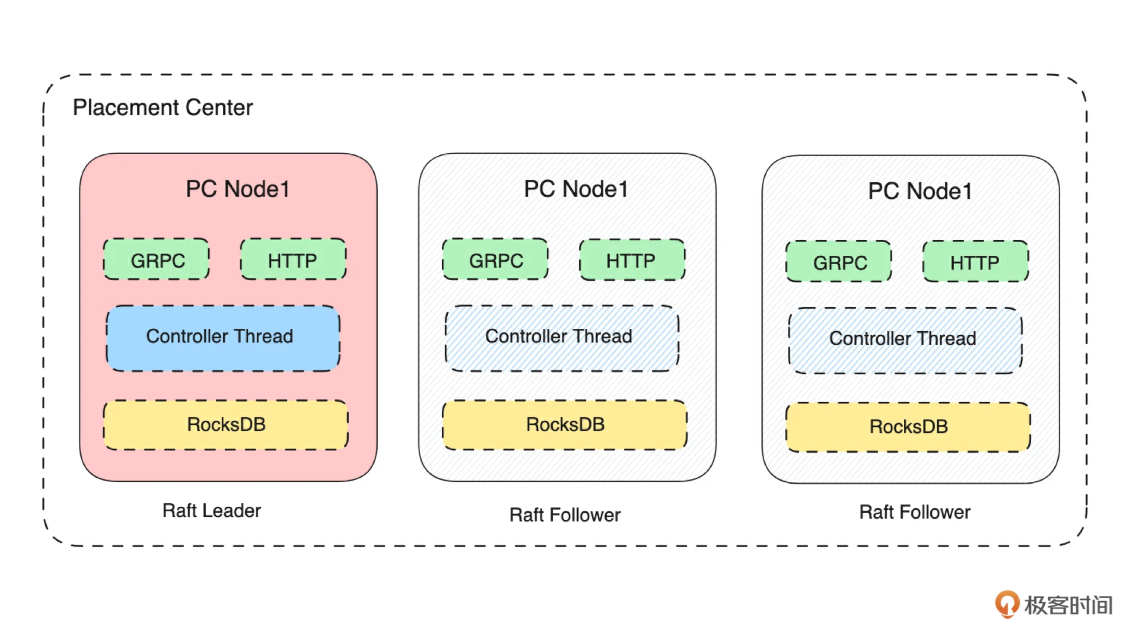
在前面的定义中,我们的元数据服务有两个功能:
- 分布式的 KV 存储能力:需要给 Broker 集群提供分布式的 KV 存储能力,从性能来看,需要支持较高并发的读写。
- 集群管控和调度能力: 根据运行信息对 Broker 集群进行管控、调度,比如元数据更新、Leader 切换等等。
所以从网络模块的角度来看,就需要能支持:较高的吞吐和并发能力。那协议怎么选择呢?
从技术上来看,很多开源组件会选择 TCP + 自定义协议来完成网络 Server 的开发。我们最终选择的是基于 gRPC 协议来实现我们的 Server。考虑如下:
- gRPC 是标准的网络通讯框架,具备现成的 Server 端库和多语言 SDK。基于 gRPC 框架实现网络 Server 会极大地降低开发成本。
- gRPC 协议底层是基于 HTTP2 和 Protobuf 来实现数据通信的,具备较高的吞吐性能。
- 元数据服务是用来给 Broker 集群提供服务的,所以从业务特点上不会有非常高的数据量的吞吐。
- 元数据服务是集群化部署,允许多节点快速横向部署扩容,不需要单机具备极高的性能。
另外作为一个元数据存储服务,它一般需要提供 HTTP 协议的接口来给管控页面或者用户做一些管理操作。比如增删改查集群、用户、权限信息,查看集群运行的监控数据等等。所以我们还需要提供 HTTP 协议的 Server 来支持这类场景。
总结来看,我们的元数据服务需要提供基于 gRPC 协议的数据面 Server 和基于 HTTP 协议的管控面 Server。
接下来我们来看看如何基于 Axum 来实现 HTTP Server。
基于 Axum 支持 HTTP Server
在 Rust 中,Axum 是实践中选择最多的框架。教程很齐全,就不展开细讲各个技术细节了,需要的话你可以看《官方文档》和《Demo 示例》。 在 Demo 里面你几乎可以找到所有需要的用法。
从元数据服务的管控功能来看,我们需要提供 HTTP 协议的对资源的增删改查接口。所以我们的 HTTP Server 需要具备以下四个功能:
- 支持 Restful 规范的 HTTP 接口。
- 支持多版本接口的管理。
- 返回 JSON 格式的请求和返回。
- 支持在接口中处理各种业务逻辑,比如数据读写、缓存读取等。
这四个功能基本包含了我们对一个 HTTP Server 的基本诉求,接下来我们从主要代码来讲解一下实现的逻辑。
首先通过函数 start_http_server 来启动 HTTP Server。
pub async fn start_http_server(state: HttpServerState, stop_sx: broadcast::Sender<bool>) {
# 读取配置
let config = placement_center_conf();
# 组装监听地址和端口
let ip: SocketAddr = match format!("0.0.0.0:{}", config.http_port).parse() {
Ok(data) => data,
Err(e) => {
panic!("{}", e);
}
};
// 构建路由信息
let app = routes(state);
let mut stop_rx = stop_sx.subscribe();
// 绑定端口,如果端口绑定失败,直接退出程序
let listener = match tokio::net::TcpListener::bind(ip).await {
Ok(data) => data,
Err(e) => {
panic!("{}", e);
}
};
// 通过 select 来同时监听进程停止信号和 Server 运行
select! {
val = stop_rx.recv() =>{
match val{
Ok(flag) => {
if flag {
info!("HTTP Server stopped successfully");
break;
}
}
Err(_) => {}
}
},
// 监听服务
val = axum::serve(listener, app.clone())=>{
match val{
Ok(()) => {
// info!("HTTP Server started successfully, listening on port {}",config.http_port)
},
Err(e) => {
// HTTP 服务监听失败,直接退出程序
panic!("{}",e);
}
}
}
}
}
上面的代码主要逻辑都在注释中,不再展开。我们主要关注select和panic这两个语法。
- 在 Rust 中 select 的功能是等待多个并发分支,如果有一个分支返回,则取消剩余分支。在上面的代码中,如果接收到停止进程的信号或者 HTTP Server 停止,则 select 就会返回。因此,用 select 语法从功能上是为了能够正确处理进程停止信号。select 相关详细资料可以参考《Tokio Select》。
- panic 是退出进程的信号,当出现不可逆异常时,可以通过这个语法退出进程。
接下来,来看看定义路由的代码,这块属于 Axum Router 的官方语法的使用,细节可以参考这个文档《Axum Router》。
#[derive(Clone)]
pub struct HttpServerState {
mysql:DB
}
impl HttpServerState {
pub fn new(mysql:DB) -> Self {
return Self {mysql};
}
}
fn routes(state: HttpServerState) -> Router {
// 定义不同的http path 路径被哪个服务处理
let common = Router::new()
.route(&v1_path(&path_list(ROUTE_ROOT)), get(index))
.route(&v1_path(&path_create(ROUTE_ROOT)), post(index))
.route(&v1_path(&path_update(ROUTE_ROOT)), put(index))
.route(&v1_path(&path_delete(ROUTE_ROOT)), delete(index));
// 构建路由信息并返回,Axum的 merge 和 with_state 语法
let app = Router::new().merge(common);
return app.with_state(state);
}
// 业务处理逻辑 index 函数
pub async fn index(State(state): State<HttpServerState>) -> String {
state.mysql.query("select * .....");
return success_response("{}");
}
// 通过 serde_json 返回json 格式的数据。
pub fn success_response<T: Serialize>(data: T) -> String {
let resp = Response {
code: 0,
data: data,
};
return serde_json::to_string(&resp).unwrap();
}
在上面的代码中,需要关注的有 HttpServerState、Route merge、success_response 三个语法。
- HttpServerState 是一个我们自定义的数据结构,它是和 app.with_state 结合起来用的,允许我们将自定义变量通过HttpServerState 传递给真正的业务逻辑。比如 HttpServerState 包含了一个变量 MySQL,它是 MySQL driver。所以我们在上面的 index 函数中,就可以通过 state.mysql 来获取到 MySQL driver,执行 SQL 进行数据查询。因此如果有其他的全局变量都可以通过这个 state 来传递给各个 HTTP Server 处理。
- Route merge 是一个官方语法,主要功能是方便你管理多个 route,直接参考《Axum Router》即可。
- 在success_response方法中,使用 serde_json 将数据编码成 json 格式进行返回。
细心的同学会关注到类似 v1_path 和 path_get 两个函数。它是我们自定义的一个函数,用来实现 API 版本管理的。逻辑很简单,贴个代码你就懂了。
pub(crate) fn v1_path(path: &str) -> String {
return format!("/v1{}", path);
}
pub(crate) fn path_get(path: &str) -> String {
return format!("{}/get", path);
}
当完成上面的代码后,最后访问地址http://127.0.0.1:8971/v1/index/list,效果如下:
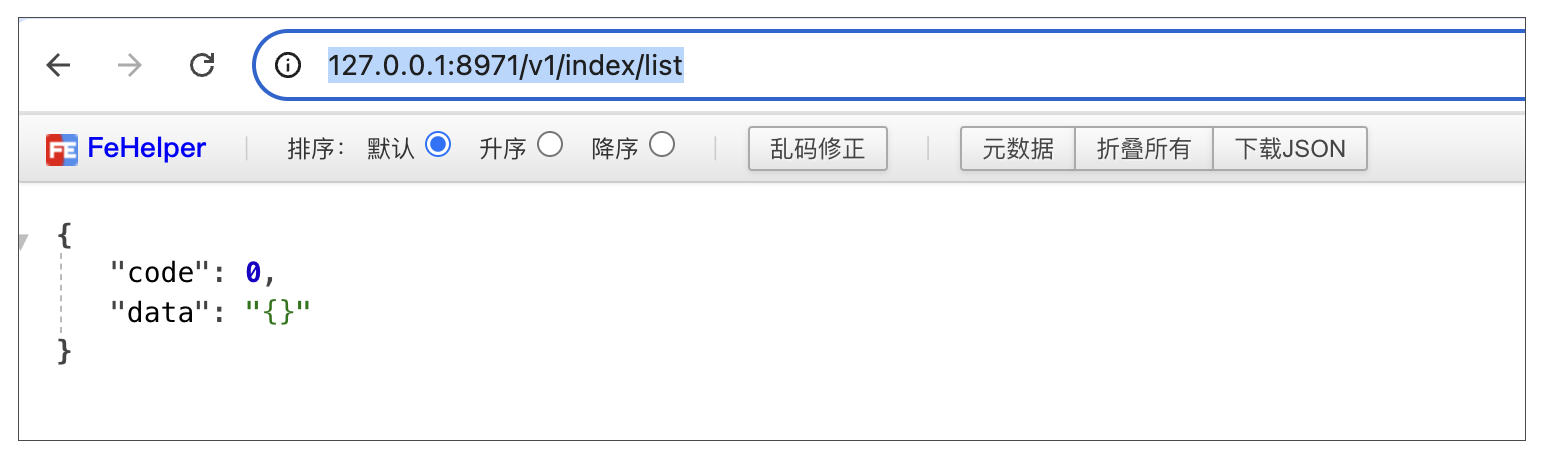
到了这里,我们就完成了满足上述 4 个需求的 HTTP Server 了,更多细节就需要你自己去扩展了。
接下来我们来实现基于 gRPC 协议的数据面 Server。
基于 Tonic 实现 gRPC Server
从技术上来看,Rust 中 gRPC 的实现是比较成熟的,有现成的框架可以用。从实践来看,我建议使用《Tonic 库》来实现。我推荐两个 gRPC 代码示例库《Example1》和《Example2》,这里面有各种场景的 gRPC 示例。
从编码角度来看,基于 Tonic 库实现 gRPC Server 主要包含五步:
- 编写 protobuf 文件,即通过 protobuf 语法定义 RPC 的方法和参数
- 编译 protobuf 文件
- 在服务端,实现 RPC Service
- 启动 gRPC Server
- 运行测试用例
首先来编写元数据服务的 gRPC Server 的 protobuf 文件。我们知道它的一个重要功能就是 KV 型数据的存储,所以 gRPC Server 就得支持 KV 中 set/delete/get/exists 四个功能。
所以 Server 的 Protobuf 文件 placement_center.proto,内容如下:
syntax = "proto3";
package kv;
import "common.proto";
service KvService {
rpc set(SetRequest) returns(common.CommonReply){}
rpc delete(DeleteRequest) returns(common.CommonReply){}
rpc get(GetRequest) returns(GetReply){}
rpc exists(ExistsRequest) returns(ExistsReply){}
}
message SetRequest{
string key = 1;
string value = 2;
}
message GetRequest{
string key = 1;
}
message GetReply{
string value = 1;
}
message DeleteRequest{
string key = 1;
}
message ExistsRequest{
string key = 1;
}
message ExistsReply{
bool flag = 1;
}
上面的语法很简单,定义了 set、delete、get、exists 四个 RPC 方法,以及对应的request/reply 参数。我们使用的是 protobuf 3 的语法,关于 protobuf 3 的语法,你可以去看《protobuf 3 指南》。
接下来这一步是需要重点关注的:proto 文件只是定义 RPC 的调用信息,如果要在Rust 使用这个 proto 文件,则需要将其编译成 .rs 文件。
在 Rust 使用 protobuf,有两种方式。
- 第一种方法:使用 tonic 库中的宏 tonic::include_proto!,使用姿势如下:
Rust 中宏的作用直观理解就是:翻译/填充代码。在上面的示例中,就是把placement_center.rs 文件编译成 Rust 的代码,然后把生成的代码填充到 placement_center_grpc 的模块中。为了代码简洁,基于宏是主流推荐的用法。
- 第二种用法:手动使用《tonic_build》库将protobuf 代码编译成 Rust 代码。然后再正常 通过 use 使用编译完成的代码。为了让你能更加理解这个流程,我们的课程使用这种用法,下面是编译 protobuf 文件到 Rust 代码的代码示例。
fn build_pb() {
tonic_build::configure()
.build_server(true)
// 指定生成的rust 存放的目录
.out_dir("src/") // you can change the generated code's location
.compile(
&[
// 指定需要编译的 proto 文件
"src/kv.proto",
],
// 指定在哪个目录寻找 .proto 文件
&["src/"], // specify the root location to search proto dependencies
)
.unwrap();
}
当执行完这个代码,就会自动在 src 目录下生成 kv.rs 的文件。如下所示:
第二种方法相比第一种方法麻烦了许多,每次修改 proto 文件后都得手动编译一次。其实从底层来看,tonic::include_proto 宏本质上也是使用 tonic_build 编译的 proto 文件。只是通过 Rust 宏的特性,自动执行了这一步而已。这里需要注意的是,topic_build 底层是调用《prost 库》实现Protocol Buffers编译的。
接下来我们来实现 gRPC Server 端的 KV Server,也就是 RPC 中的方法。代码如下:
use protocol::kv::{
kv_service_server::KvService, CommonReply, DeleteRequest, ExistsReply, ExistsRequest, GetReply,
GetRequest, SetRequest,
};
use tonic::{Request, Response, Status};
// 定义GrpcBrokerServices结构体
pub struct GrpcBrokerServices {
// 初始化一个基于 DashMap 库的 HashMap
data: DashMap<String, String>,
}
impl GrpcBrokerServices {
pub fn new() -> Self {
return GrpcBrokerServices {
data: DashMap::with_capacity(8),
};
}
}
// 在GrpcBrokerServices中实现 set/get/delete/exists 四个方法
// 当前实现是将数据保存在内存中的
#[tonic::async_trait]
impl KvService for GrpcBrokerServices {
async fn set(&self, request: Request<SetRequest>) -> Result<Response<CommonReply>, Status> {
let req = request.into_inner();
self.data.insert(req.key, req.value);
return Ok(Response::new(CommonReply::default()));
}
async fn get(&self, request: Request<GetRequest>) -> Result<Response<GetReply>, Status> {
let req = request.into_inner();
if let Some(data) = self.data.get(&req.key) {
return Ok(Response::new(GetReply {
value: data.value().clone(),
}));
}
return Ok(Response::new(GetReply::default()));
}
async fn delete(
&self,
request: Request<DeleteRequest>,
) -> Result<Response<CommonReply>, Status> {
let req = request.into_inner();
self.data.remove(&req.key);
return Ok(Response::new(CommonReply::default()));
}
async fn exists(
&self,
request: Request<ExistsRequest>,
) -> Result<Response<ExistsReply>, Status> {
let req = request.into_inner();
return Ok(Response::new(ExistsReply {
flag: self.data.contains_key(&req.key),
}));
}
}
上面的代码比较简单,基于 Tonic 的规范,实现了我们在 proto 文件中定义的 set/get/delete/exists 方法。细节比较简单,就不赘述了。
接着来启动 gRPC Server。
pub async fn start_grpc_server(stop_sx: broadcast::Sender<bool>) {
let config = placement_center_conf();
let server = GrpcServer::new(config.grpc_port);
server.start(stop_sx).await;
}
pub struct GrpcServer {
port: usize,
}
impl GrpcServer {
pub fn new(port: usize) -> Self {
return Self { port };
}
pub async fn start(&self, stop_sx: broadcast::Sender<bool>) {
let addr = format!("0.0.0.0:{}", self.port).parse().unwrap();
info!("Broker Grpc Server start. port:{}", self.port);
let service_handler = GrpcBrokerServices::new();
let mut stop_rx = stop_sx.subscribe();
select! {
val = stop_rx.recv() =>{
match val{
Ok(flag) => {
if flag {
info!("HTTP Server stopped successfully");
}
}
Err(_) => {}
}
},
val = Server::builder().add_service(KvServiceServer::new(service_handler)).serve(addr)=>{
match val{
Ok(()) => {
},
Err(e) => {
panic!("{}",e);
}
}
}
}
}
}
启动 Server 和上面启动 HTTP Server 差不多,核心是这行代码:
Server::builder().add_service(KvServiceServer::new(service_handler)).serve(addr)
即通过 Tonic 启动 gRPC Server,并增加 GrpcBrokerServices 处理逻辑。最后我们可以来写一个测试用例来测试 KV Server 是否运行正常。
#[tokio::test]
async fn kv_test() {
let mut client = KvServiceClient::connect("http://127.0.0.1:8871")
.await
.unwrap();
let key = "mq".to_string();
let value = "robustmq".to_string();
let request = tonic::Request::new(SetRequest {
key: key.clone(),
value: value.clone(),
});
let _ = client.set(request).await.unwrap();
let request = tonic::Request::new(ExistsRequest { key: key.clone() });
let exist_reply = client.exists(request).await.unwrap().into_inner();
assert!(exist_reply.flag);
let request = tonic::Request::new(GetRequest { key: key.clone() });
let get_reply = client.get(request).await.unwrap().into_inner();
assert_eq!(get_reply.value, value);
let request = tonic::Request::new(DeleteRequest { key: key.clone() });
let _ = client.delete(request).await.unwrap().into_inner();
let request = tonic::Request::new(ExistsRequest { key: key.clone() });
let exist_reply = client.exists(request).await.unwrap().into_inner();
assert!(!exist_reply.flag);
}
至此,我们的 gRPC Server 的框架就基本搭建完成了。接下来就是按照上面的流程去添加自己的服务就可以了。
需要注意的是,上面的代码只是最基本的 gRPC Server 的实现,在Rust gRPC Server 中,还有比如负载均衡、TLS、鉴权、拦截器、压缩等高级功能。这块就不展开讲了,直接看官网文档《Tonic 库》即可。
细心的同学可能会关注到上面的代码有变量 stop_sx: broadcast::Sender,那它是起什么作用的呢?
broadcast::Sender 是 Tokio 提供的 Channel,用于在多个Task之间通信,详细资料可以看《Tokio Channel》。可以看到 stop_sx 是 Tokio 中的 broadcast 类型,broadcast 是一种广播通道,可以有多个Sender端以及多个Receiver端,任何一个Sender发送的每一条数据都能被所有的Receiver端看到。所以我们通过 broadcast Channel 来接收进程停止信号,并分发给所有的broadcast Receiver,从而达到优雅停止所有线程的目的。
Tokio 并行运行多个服务
先来看一段代码,你能从下面这段代码中看出什么问题吗?
pub async fn start_server(stop_sx: broadcast::Sender<bool>) {
let state = HttpServerState::new();
start_http_server(state, stop_sx.clone()).await;
start_grpc_server(stop_sx.clone()).await;
}
上面代码的问题是:运行到 start_http_server 函数会卡住,start_grpc_server 是运行不到的。因为启动 HTTP Server 的代码和启动 gRPC Server 的代码都是卡住的。
那怎么处理呢? 来看下面的代码。
pub async fn start_server(stop_sx: broadcast::Sender<bool>) {
// 将 grpc server 运行在一个独立的 tokio task 中。
let raw_stop_sx = stop_sx.clone();
tokio::spawn(async move {
start_grpc_server(raw_stop_sx).await;
});
// 将 http server 运行在一个独立的 tokio task 中。
let raw_stop_sx = stop_sx.clone();
tokio::spawn(async move {
let state = HttpServerState::new();
start_http_server(state, raw_stop_sx).await;
});
// 等待进程信号
awaiting_stop(stop_sx.clone()).await;
}
pub async fn awaiting_stop(stop_send: broadcast::Sender<bool>) {
// 等待接收 ctrl c 停止线程的信号。
signal::ctrl_c().await.expect("failed to listen for event");
// 当接手到 ctrl c 信号时,给http server 和 grpc server 线程发送停止信号
match stop_send.send(true) {
Ok(_) => {
info!(
"{}",
"When ctrl + c is received, the service starts to stop"
);
// 在这里允许执行相关回收逻辑。
}
Err(e) => {
panic!("{}", e);
}
}
}
这里有两个重点:
- 将 HTTP Server 和 gRPC Server 通过 tokio::spawn 异步运行在一个独立的 tokio task 中,让它不阻塞主进程。
- 依赖 signal::ctrl_c() 来阻塞主进程,让主进程不退出,并且等待接收 ctrl + c 信号,当接收到信号时,就执行相关回收逻辑。
服务成功启动后,当我们按 ctrl+c,服务接收到信号,发送停止信号给多个运行线程,停止HTTP 和 gRPC 服务。效果如下:

总结
tips:每节课的代码都能在项目 https://github.com/robustmq/robustmq-geek 中找到源码,有兴趣的同学可以下载源码来看。
这节课我们首先讲了我们的元数据服务需要什么类型的 Server,这一步是很重要的,要根据我们的需求和场景选择合适的 Server。可以参考我们前面的选择思考逻辑。
接下来我们讲了HTTP Server 和 gRPC Server 的实现要点以及主体框架的开发。这里总结下主要依赖的库:
- Tokio:Rust 异步运行的标准库。
- Axum:Rust 语言的 HTTP Web 框架。
- Tonic:Rust 语言的 gRPC 框架的实现。
- Prost:Protocol Buffers 的 Rust 语言的实现,Tonic 及其相关库(tonic_build)关于 Proto 部分都是用这个库。
最后我们讲了基于 tokio spawn、tokio signal、tokioc broadcast channel 来实现并行运行多个服务和程序平滑退出的能力。
另外,这节课我们只是讲了上面几个库的基本主体功能,课下还需要你深入去研究这几个库的文档,才能在实战中更好地使用它们。
思考题
这里是本节课推荐的相关 issue 的任务列表,请点击查看《Good First Issue》,任务列表会不间断地更新。欢迎给我的项目 https://github.com/robustmq/robustmq 点个 Star 啊!
- Joe Black 👍(0) 💬(0)
我觉得这里介绍编译protobuf文件时,最好顺带的说一点build.rs的作用。这个对于其它语言转过来的开发者而言还是挺新奇的。
2024-10-10 - 吃饱喝足开始干活 👍(0) 💬(0)
简单例子,最易吸收❤️
2024-09-21