09 Coroutines实战(一):异步文件操作库
你好,我是卢誉声。
在上一讲中,我们掌握了C++20标准下需要实现的协程接口约定。就目前来说,在没有标准库支持的情况下,这些约定我们都需要自己实现。
但是,仅通过阅读标准文档或参考代码,编写满足C++协程约定的程序比较困难。因此,我安排了两讲内容带你实战演练一下,以一个异步文件系统操作库为例,学习如何编写满足C++协程约定的程序。
这一讲我们先明确模块架构,完成基础类型模块和任务调度模块,为后面实现基于协程的异步I/O调度打好基础,今天的重点内容是任务调度模块。
好,话不多说,就让我们从模块架构开始,一步步实现任务调度模块((课程配套代码,点击这里即可获取))。
模块组织方式
由于这是一个用C++实现的异步文件操作库,我们就将它命名为asyncpp,取async(即异步asynchronous这一单词的缩写)和cpp的组合。这个基于C++协程的库支持通用异步任务、I/O异步任务以及异步文件系统操作,主要用于I/O等任务而非计算任务。
整个项目的模块架构图如下。
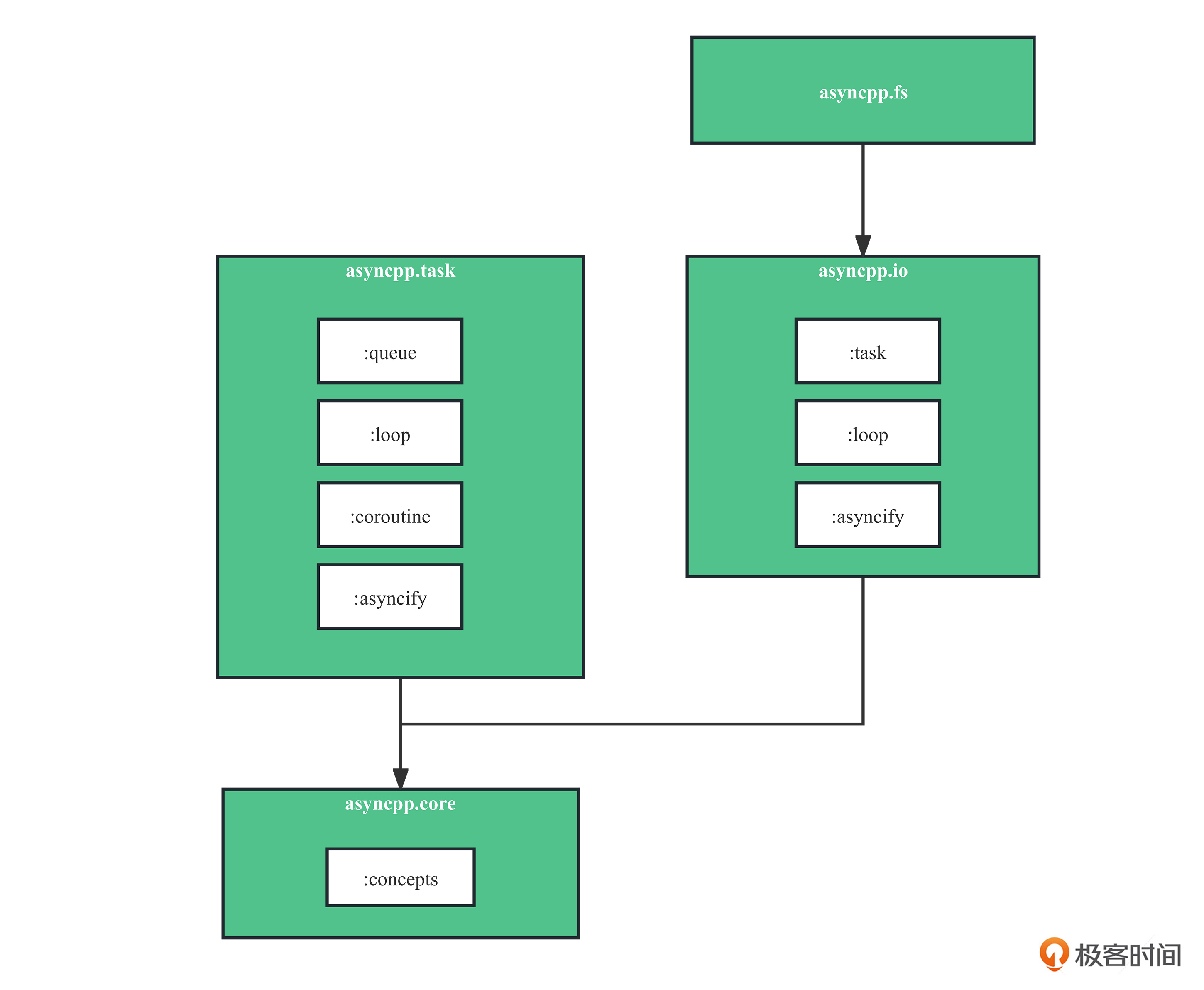
我们用C++ Modules组装整个库,我先带你了解一下里面的模块有哪些。
- asyncpp.core:核心的基础类型模块,主要用来定义基础的类型与concepts。
- asyncpp.task:通用异步任务模块,实现了主线程内的异步任务框架,包括queue、loop、coroutine和asyncify几个分区。
- asyncpp.io:异步I/O模块,实现了独立的异步I/O线程和任务处理框架,用于独立异步处理I/O,包括task、loop和asyncify几个分区。
- asyncpp.fs:异步文件系统模块,基于asyncpp.io模块实现了异步的文件系统处理函数。
对照示意图从下往上看,所有模块都是基于asyncpp.core这个基础类型模块实现的。而asyncpp.task是库的核心模块,asyncpp.io在该核心模块的基础上提供了异步I/O的支持。
有了清晰的模块划分,我们先从基础类型模块——asyncpp.core开始编写。
基础类型模块
基础类型模块提供了库中使用的基本类型的Concepts,因此我们重点关注这个concepts分区,实现在core/Concepts.cpp中。
export module asyncpp.core:concepts;
import <type_traits>;
namespace asyncpp::core {
export template <typename T>
concept Invocable = std::is_invocable_v<T>;
}
在这段代码中,我们定义了Invocable这个concept,用于判定T是否是可调用的。
这个concept定义的约束为std::is_invocable_v,用于判定T()这个函数调用表达式是否合法。由于用户传入的类型可能是普通函数、成员函数、函数对象或者lambda表达式,因此这里不能用std::is_function_v,因为这个traits只支持普通函数,不支持其他的可作为函数调用的类型。
接下来我们还要定义基础类型模块的导出模块,代码在core/Core.cpp中。我们可以看到,代码中导入并重新导出了所有的分区。
基础类型模块的工作告一段落,接下来要实现的所有模块,我们都会直接或间接使用基础类型模块中的Concepts。
任务调度模块
接下来就到了重头戏——完成任务调度模块,这是库的核心模块。为了让你更直接地了解C++20以后可以怎么使用协程,接下来我们基于协程约定,实现异步任务的定义与调用。同时,你也会看到,协程的调度细节隐藏在封装的接口实现中,这样可以降低协程的使用门槛。
先说说设计思路。因为asyncpp主要用于I/O等任务而非计算任务,所以我们模仿了NodeJS的实现——在主线程中实现任务循环,所有的异步任务都会放入这个任务循环中执行,并通过循环实现协程的调度。
如果要实现真正的异步,需要结合另外的工作线程来执行需要异步化的任务,task模块中提供了异步任务的提交接口,提交后的实现我们在后续的I/O调度模块中完成。
现在,我们来实现任务调度模块的各个分区。
queue分区
首先我们看一下queue分区task/AsyncTaskQueue.cpp,这是一个任务队列的实现。
export module asyncpp.task:queue;
import <functional>;
import <mutex>;
import <vector>;
namespace asyncpp::task {
export struct AsyncTask {
// 异步任务处理函数类型
using Handler = std::function<void()>;
// 异步任务处理函数
Handler handler;
};
export class AsyncTaskQueue {
public:
static AsyncTaskQueue& getInstance();
void enqueue(const AsyncTask& item) {
std::lock_guard<std::mutex> guard(_queueMutex);
_queue.push_back(item);
}
bool dequeue(AsyncTask* item) {
std::lock_guard<std::mutex> guard(_queueMutex);
if (_queue.size() == 0) {
return false;
}
*item = _queue.back();
_queue.pop_back();
return true;
}
size_t getSize() const {
return _queue.size();
}
private:
// 支持单例模式,通过default修饰符说明构造函数使用默认版本
AsyncTaskQueue() = default;
// 支持单例模式,通过delete修饰符说明拷贝构造函数不可调用
AsyncTaskQueue(const AsyncTaskQueue&) = delete;
// 支持单例模式,通过delete修饰符说明赋值操作符不可调用
AsyncTaskQueue& operator=(const AsyncTaskQueue&) = delete;
// 异步任务队列
std::vector<AsyncTask> _queue;
// 异步任务队列互斥锁,用于实现线程同步,确保队列操作的线程安全
std::mutex _queueMutex;
};
AsyncTaskQueue& AsyncTaskQueue::getInstance() {
static AsyncTaskQueue queue;
return queue;
}
}
这段代码的核心部分是AsyncTaskQueue类,主要实现了enqueue函数和dequeue函数。
enqueue函数负责将任务添加到任务队列尾部,这里我们用到了互斥锁来实现线程同步。
dequeue则是从任务队列头部获取任务,取出任务后会将任务数据从队列中清理掉,防止重复执行任务。这里同样用了互斥锁来实现线程同步,如果任务不存在会返回false;如果任务存在会将任务写入到参数传入的指针中并返回true。
loop分区
接下来是loop分区task/AsyncTaskLoop.cpp,实现了消息循环,我们会在loop分区使用刚才实现的queue分区,用作消息循环中的任务队列。后面是具体代码。
export module asyncpp.task:loop;
import :queue;
import <cstdint>;
import <chrono>;
namespace asyncpp::task {
export class AsyncTaskLoop {
public:
// 常量,定义了任务循环的等待间隔时间(单位为毫秒)
static const int32_t SLEEP_MS = 1000;
static AsyncTaskLoop& getInstance();
static void start() {
getInstance().startLoop();
}
private:
// 支持单例模式,通过default修饰符说明构造函数使用默认版本
AsyncTaskLoop() = default;
// 支持单例模式,通过delete修饰符说明拷贝构造函数不可调用
AsyncTaskLoop(const AsyncTaskLoop&) = delete;
// 支持单例模式,通过delete修饰符说明赋值操作符不可调用
AsyncTaskLoop& operator=(const AsyncTaskLoop&) = delete;
void startLoop() {
while (true) {
loopExecution();
std::this_thread::sleep_for(std::chrono::milliseconds(SLEEP_MS));
}
}
void loopExecution() {
AsyncTask asyncEvent;
if (!AsyncTaskQueue::getInstance().dequeue(&asyncEvent)) {
return;
}
asyncEvent.handler();
}
};
AsyncTaskLoop& AsyncTaskLoop::getInstance() {
static AsyncTaskLoop eventLoop;
return eventLoop;
}
}
这段代码的核心是AsyncTaskLoop类,主要实现了start、startLoop和loopExecution这三个成员函数,我们依次来看看这些函数的作用。
start用于在当前线程启动任务循环,实现是调用startLoop,调用后当前线程会阻塞,直到出现需要执行的任务。
startLoop用来启动任务循环,其实现是一个循环,每次循环会调用loopExecution成员函数,然后通过this_thread的sleep睡眠等待一段时间,给其他线程让出CPU。
如果你足够细心,刚才看代码时可能已经注意到了,这里的时间定义成了一个常量。在真实的开发场景里,这个时间会很短,我们这里为了演示任务调度过程,特意将时间设置为1000ms,这样输出过程会更加明显。
loopExecution用来执行任务,其实现是从任务队列AsyncTaskQueue实例中获取最早的任务,如果任务不存在就直接返回。
coroutine分区
接下来是coroutine分区task/Coroutine.cpp,实现了C++协程约定的几个类型与相关接口,为使用协程进行任务调度提供关键支持。代码如下所示。
export module asyncpp.task:coroutine;
import <coroutine>;
import <functional>;
namespace asyncpp::task {
// 协程类
export struct Coroutine {
// 协程Promise定义
struct promise_type {
Coroutine get_return_object() {
return {
._handle = std::coroutine_handle<promise_type>::from_promise(*this)
};
}
std::suspend_never initial_suspend() { return {}; }
std::suspend_never final_suspend() noexcept { return {}; }
void return_void() {}
void unhandled_exception() {}
};
// 协程的句柄,可用于构建Coroutine类,并在业务代码中调用接口进行相关操作
std::coroutine_handle<promise_type> _handle;
};
// AsyncTaskSuspender类型声明
export template <typename ResultType>
struct Awaitable;
export using AsyncTaskResumer = std::function<void()>;
export using CoroutineHandle = std::coroutine_handle<Coroutine::promise_type>;
export template <typename ResultType>
using AsyncTaskSuspender = std::function<void(
Awaitable<ResultType>*, AsyncTaskResumer, CoroutineHandle&
)>;
// Awaitable类型定义(当任务函数返回类型不为void时)
export template <typename ResultType>
struct Awaitable {
// co_await时需要执行的任务,开发者可以在suspend实现中调用该函数执行用户期望的任务
std::function<ResultType()> _taskHandler;
// 存储任务执行的结果,会在await_resume中作为co_await表达式的值返回
ResultType _taskResult;
// 存储开发者自定义的await_suspend实现,会在await_suspend中调用
AsyncTaskSuspender<ResultType> _suspender;
bool await_ready() { return false; }
void await_suspend(CoroutineHandle h) {
_suspender(this, [h] { h.resume(); }, h);
}
ResultType await_resume() {
return _taskResult;
}
};
// Awaitable类型定义(当任务函数返回类型为void时)
export template <>
struct Awaitable<void> {
// co_await时需要执行的任务,开发者可以在suspend实现中调用该函数执行用户期望的任务
std::function<void()> _taskHandler;
// 存储开发者自定义的await_suspend实现,会在await_suspend中调用
AsyncTaskSuspender<void> _suspender;
bool await_ready() { return false; }
void await_suspend(CoroutineHandle h) {
_suspender(this, [h] { h.resume(); }, h);
}
void await_resume() {}
};
}
在这段代码中,我们定义了C++协程支持的几个关键类型。首先,是协程类型Coroutine,协程调用者一般需要通过该类型操作coroutine_handle,来实现协程的调度,该定义包含了嵌套类型promise_type和协程句柄变量_handle。
接着,在Coroutine中定义了Promise类型,该对象在协程生命周期中一直存在,因此可以在不同的线程或者函数之间传递协程的各类数据与状态。
类型中的大多数接口没有特殊行为,所以都用了默认实现(空函数)。其中比较特殊的是get_return_object,我们在上一讲说过,协程调用者调用协程时获取到的返回值就是该函数的返回值。
这里我们通过coroutine_handle的from_promise函数获取到promise对象对应的协程句柄,调用Coroutine的构造函数生成Coroutine对象并返回,因此协程函数的调用者获取到该对象后,可以根据业务控制调度协程。
接着,我们定义了CoroutineHandle类型,这是std::coroutine_handle的别名,也就是协程的句柄。
协程句柄是C++提供的唯一的协程标准类型,指向一次协程调用生成的协程帧,因此可以访问到存储在协程帧上的Promise对象。协程句柄提供了协程调度的标准函数,是协程调用者进行协程调度的基础。
由于该类型是一个泛型类(模板参数是Promise的类型),而且会在后续代码中频繁使用,为了方便,我们为std::coroutine_handle<Coroutine:promise_type>定义了一个别名CoroutineHandle。
最后,我们定义了Awaitable类型,在协程中使用co_await进行休眠时需要该类型支持。
Awaitable对于实现协程调度至关重要,其中 await_resume 和 await_suspend 的实现是重点。我们在此做出进一步分析。
首先,是await_resume的实现。假设用户需要通过co_await异步执行函数f,并在f结束后获取到f的返回值作为co_await表达式的值,也就是我们希望实现的效果是:
当f执行结束后协程会被唤醒,并将f的返回值赋给result。
另外,考虑到函数f的返回类型为void的情况(相当于没有返回值),它与“返回值类型不为void”时的实现完全不同,不需要存储函数f的返回值。
因此,我在这里定义了一个Awaitable的特化版本——当函数f的返回类型为void时,会使用该版本的Awaitable类。在该版本中,不会存储函数f的返回值,await_resume的返回类型固定为void,并且不会返回任何值。
接着,是await_suspend的实现,通过它,我们就能控制在“何时、何处”唤醒被co_await休眠的协程。
这里允许开发者通过AsyncTaskSuspender来实现await_suspend的具体行为。await_suspend中会调用开发者实现的函数,来唤醒休眠的协程。
AsyncTaskSuspender包含后面这三个参数,开发者可以利用这些参数实现不同的调度机制。
- Awaiter对象指针:Awaitable*。
- 协程的唤醒函数:AsyncTaskResumer。
- 协程的句柄:CoroutineHandle&。
asyncify分区
接下来是asyncify分区task/Asyncify.cpp,该分区实现了asyncify工具函数,用于将一个普通的函数f转换成一个返回Awaitable对象的函数asyncF。通过这个分区实现的工具,可以让库的用户更容易使用我们在上一节实现的Coroutine。
开发者通过co_await调用asyncF,就可以实现函数f的异步调用,并在f执行完成后,重新唤醒协程。如果你了解过JavaScript,可以将其类比成ES6中的promsify。后面是代码实现。
export module asyncpp.task:asyncify;
export import :queue;
export import :loop;
export import :coroutine;
import asyncpp.core;
namespace asyncpp::task {
using asyncpp::core::Invocable;
// 默认的AsyncTaskSuspender(当任务函数返回类型不为void时)
template <typename ResultType>
void defaultAsyncAwaitableSuspend(
Awaitable<ResultType>* awaitable,
AsyncTaskResumer resumer,
CoroutineHandle& h
) {
auto& asyncTaskQueue = AsyncTaskQueue::getInstance();
asyncTaskQueue.enqueue({
.handler = [resumer, awaitable] {
awaitable->_taskResult = awaitable->_taskHandler();
resumer();
}
});
}
/* 默认的AsyncTaskSuspender(当任务函数返回类型为void时的特化版本)
*
* 当f的返回类型为void时,函数f没有返回值。因此,我们定义了一个函数返回类型为void的特化版本,
* 在该版本中构造的AsyncTask对象的handler调用用户函数f后,直接调用resumer唤醒协程,
* 不会将f的返回值存储到Awaitable对象中。
*/
template <>
void defaultAsyncAwaitableSuspend<void>(
Awaitable<void>* awaitable,
AsyncTaskResumer resumer,
CoroutineHandle& h
) {
auto& asyncTaskQueue = AsyncTaskQueue::getInstance();
asyncTaskQueue.enqueue({
.handler = [resumer, awaitable] {
awaitable->_taskHandler();
resumer();
}
});
}
// 异步化工具函数,支持将普通函数f异步化
export template <Invocable T>
auto asyncify(
T taskHandler,
AsyncTaskSuspender<std::invoke_result_t<T>> suspender =
defaultAsyncAwaitableSuspend<std::invoke_result_t<T>>
) {
return Awaitable<std::invoke_result_t<T>> {
._taskHandler = taskHandler,
._suspender = suspender
};
}
}
在这段代码中,我定义了两个版本的defaultAsyncAwaitableSuspend函数,它就是Coroutine模块中Awaitable类型所需的AsyncTaskSuspender函数,该函数的作用是在co_await休眠协程后,执行用户函数f和唤醒协程。
我们的实现其实很简单,就是构造一个AsyncTask对象并添加到AsyncTaskQueue中。AsyncTask对象的handler会执行用户函数f,将f的返回值存储到awaitable对象中,最后调用resumer唤醒协程。
接着,我们定义了asyncify模版函数,模板参数T必须符合Invocable约束,也就是必须可调用,对应了用户函数f的类型。该函数包含两个参数。
- taskHandler:期望异步执行的函数f。
- suspender:Awaitable中用户可以自己设置的AsyncTaskSuspender函数。
总结
为了帮你解决难题,熟悉怎样编写满足C++协程约定的程序,我们实现了一个异步文件系统操作库中的任务调度模块。其中coroutine分区实现了C++协程约定的几个类型与相关接口,为使用协程进行任务调度提供关键支持。
一般来说,提供异步调用的库的底层实现各有不同,但是它们的目标是一致的,就是在某个消息循环上提供异步调用的基础设施。而我们选择使用C++ Coroutines来实现高性能异步调度能力。
在下一讲,我们将继续编程实战,使用这一讲实现的任务调度模块,继续实现基于协程的异步I/O调度。
课后思考
在目前的设计中,我们只支持co_await去等待函数执行完成,然后恢复执行。那么,在co_await表达式中,是否可以执行并等待另一个协程执行结束?如果不可以,该如何修改代码来实现这一功能呢?
不妨在这里分享你的答案,我们一同交流。下一讲见!
- 李云龙 👍(1) 💬(1)
关于课后思考题:我认为老师课件中的当前代码无法做到等待另一个协程执行结束,因为传递给await_suspend函数的协程句柄是当前协程的,所以无法获知另外一个协程的信息。如果要等待另一个协程执行结束,需要在Awaitable类中存储另外一个协程的句柄,然后defaultAysncAwaitableSuspend函数的第三个实参应该是被存储的另外一个协程的句柄。在defaultAysncAwaitableSuspend函数内部使用循环检查的方式,检查 h.done() 是否为true,只有条件成立后,再调用 AsyncTaskResumer 。 烦请老师批评指正
2023-12-25 - Steiner 👍(0) 💬(1)
我想问一下,课程中的代码是在哪个平台上运行,用哪种编译器
2024-08-19 - 常振华 👍(0) 💬(1)
.handler = [resumer, awaitable] { awaitable->_taskResult = awaitable->_taskHandler(); resumer(); } 这个写法是lamda表达式吗?然后赋值给struct AsyncTask的handler成员?
2023-09-20 - peter 👍(0) 💬(1)
请问:“主线程内”是什么意思? 文中有一句“asyncpp.task:通用异步任务模块,实现了主线程内的异步任务框架”。是说通用异步任务模块运行在主线程中吗?异步 I/O 模块、异步文件系统模块是运行在其他线程吗? 另外,“主线程”是“库”的主线程,不是调用者的主线程,对吗?
2023-02-04