06 Paxos算法(二):Multi Paxos不是一个算法,而是统称
你好,我是韩健。
经过上节课的学习,你应该知道,Basic Paxos只能就单个值(Value)达成共识,一旦遇到为一系列的值实现共识的时候,它就不管用了。虽然兰伯特提到可以通过多次执行Basic Paxos实例(比如每接收到一个值时,就执行一次Basic Paxos算法)实现一系列值的共识。但是,很多同学读完论文后,应该还是两眼摸黑,虽然每个英文单词都能读懂,但还是不理解兰伯特提到的Multi-Paxos,为什么Multi-Paxos这么难理解呢?
在我看来,兰伯特并没有把Multi-Paxos讲清楚,只是介绍了大概的思想,缺少算法过程的细节和编程所必须的细节(比如缺少选举领导者的细节)。这也就导致每个人实现的Multi-Paxos都不一样。不过从本质上看,大家都是在兰伯特提到的Multi-Paxos思想上补充细节,设计自己的Multi-Paxos算法,然后实现它(比如Chubby的Multi-Paxos实现、Raft算法等)。
所以在这里,我补充一下:兰伯特提到的Multi-Paxos是一种思想,不是算法。而Multi-Paxos算法是一个统称,它是指基于Multi-Paxos思想,通过多个Basic Paxos实例实现一系列值的共识的算法(比如Chubby的Multi-Paxos实现、Raft算法等)。 这一点尤其需要你注意。
为了帮你掌握Multi-Paxos思想,我会先带你了解,对于Multi-Paxos兰伯特是如何思考的,也就是说,如何解决Basic Paxos的痛点问题;然后我再以Chubby的Multi-Paxos实现为例,具体讲解一下。为啥选它呢?因为Chubby的Multi-Paxos实现,代表了Multi-Paxos思想在生产环境中的真正落地,它将一种思想变成了代码实现。
兰伯特关于Multi-Paxos的思考
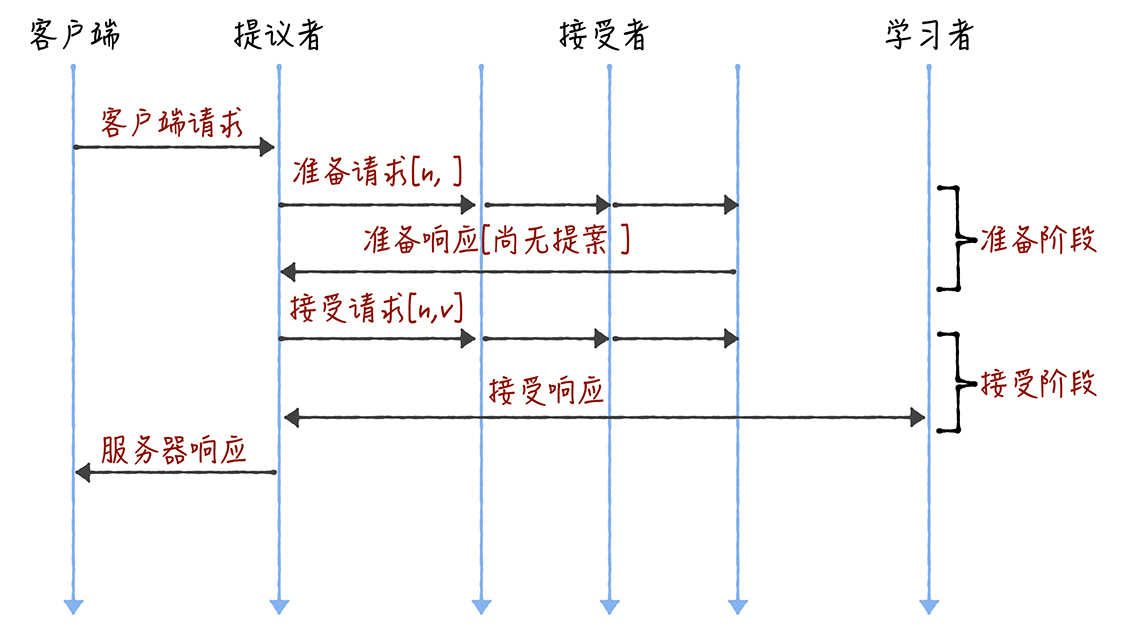
熟悉Basic Paxos的同学(可以回顾一下05讲)可能还记得,Basic Paxos是通过二阶段提交来达成共识的。在第一阶段,也就是准备阶段,接收到大多数准备响应的提议者,才能发起接受请求进入第二阶段(也就是接受阶段):
而如果我们直接通过多次执行Basic Paxos实例,来实现一系列值的共识,就会存在这样几个问题:
- 如果多个提议者同时提交提案,可能出现因为提案编号冲突,在准备阶段没有提议者接收到大多数准备响应,协商失败,需要重新协商。你想象一下,一个5节点的集群,如果3个节点作为提议者同时提案,就可能发生因为没有提议者接收大多数响应(比如1个提议者接收到1个准备响应,另外2个提议者分别接收到2个准备响应)而准备失败,需要重新协商。
- 2轮RPC通讯(准备阶段和接受阶段)往返消息多、耗性能、延迟大。你要知道,分布式系统的运行是建立在RPC通讯的基础之上的,因此,延迟一直是分布式系统的痛点,是需要我们在开发分布式系统时认真考虑和优化的。
那么如何解决上面的2个问题呢?可以通过引入领导者和优化Basic Paxos执行来解决,咱们首先聊一聊领导者。
领导者(Leader)
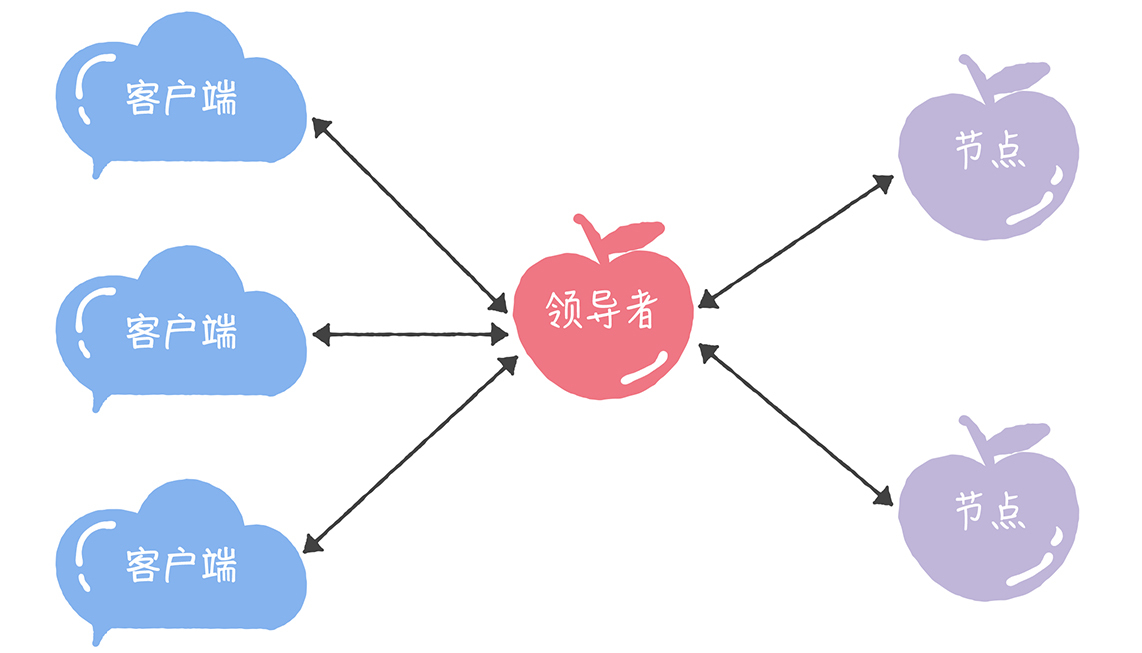
我们可以通过引入领导者节点,也就是说,领导者节点作为唯一提议者,这样就不存在多个提议者同时提交提案的情况,也就不存在提案冲突的情况了:
在这里,我补充一点:在论文中,兰伯特没有说如何选举领导者,需要我们在实现Multi-Paxos算法的时候自己实现。 比如在Chubby中,主节点(也就是领导者节点)是通过执行Basic Paxos算法,进行投票选举产生的。
那么,如何解决第二个问题,也就是如何优化Basic Paxos执行呢?
优化Basic Paxos执行
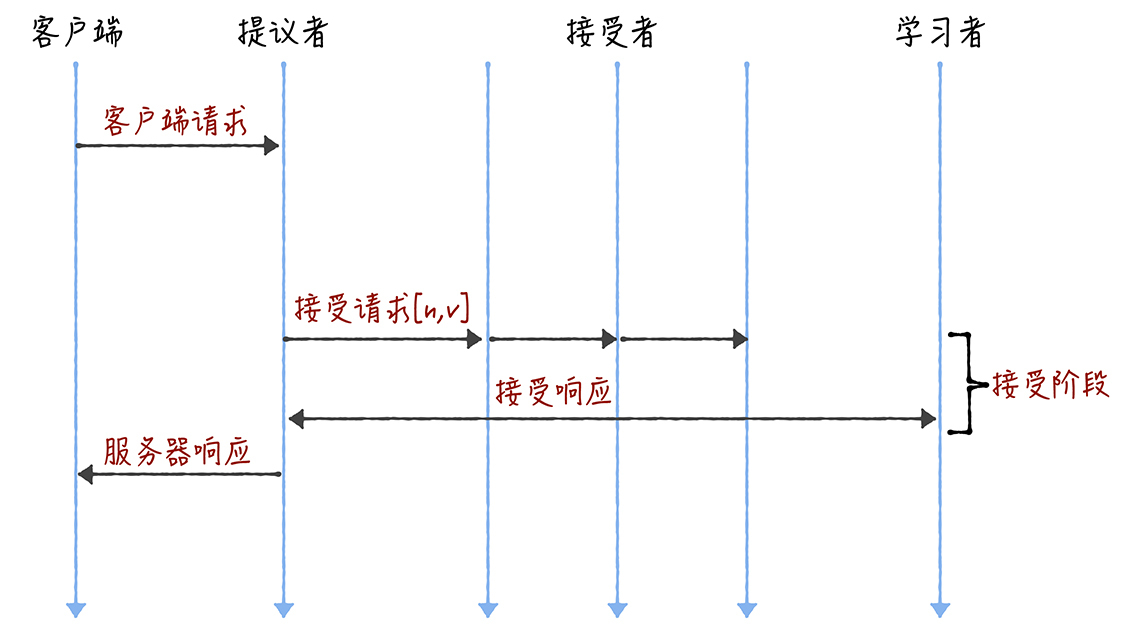
我们可以采用“当领导者处于稳定状态时,省掉准备阶段,直接进入接受阶段”这个优化机制,优化Basic Paxos执行。也就是说,领导者节点上,序列中的命令是最新的,不再需要通过准备请求来发现之前被大多数节点通过的提案,领导者可以独立指定提案中的值。这时,领导者在提交命令时,可以省掉准备阶段,直接进入到接受阶段:
你看,和重复执行Basic Paxos相比,Multi-Paxos引入领导者节点之后,因为只有领导者节点一个提议者,只有它说了算,所以就不存在提案冲突。另外,当主节点处于稳定状态时,就省掉准备阶段,直接进入接受阶段,所以在很大程度上减少了往返的消息数,提升了性能,降低了延迟。
讲到这儿,你可能会问了:在实际系统中,该如何实现Multi-Paxos呢?接下来,我以Chubby的Multi-Paxos实现为例,具体讲解一下。
Chubby的Multi-Paxos实现
既然兰伯特只是大概的介绍了Multi-Paxos思想,那么Chubby是如何补充细节,实现Multi-Paxos算法的呢?
首先,它通过引入主节点,实现了兰伯特提到的领导者(Leader)节点的特性。也就是说,主节点作为唯一提议者,这样就不存在多个提议者同时提交提案的情况,也就不存在提案冲突的情况了。
另外,在Chubby中,主节点是通过执行Basic Paxos算法,进行投票选举产生的,并且在运行过程中,主节点会通过不断续租的方式来延长租期(Lease)。比如在实际场景中,几天内都是同一个节点作为主节点。如果主节点故障了,那么其他的节点又会投票选举出新的主节点,也就是说主节点是一直存在的,而且是唯一的。
其次,在Chubby中实现了兰伯特提到的,“当领导者处于稳定状态时,省掉准备阶段,直接进入接受阶段”这个优化机制。
最后,在Chubby中,实现了成员变更(Group membership),以此保证节点变更的时候集群的平稳运行。
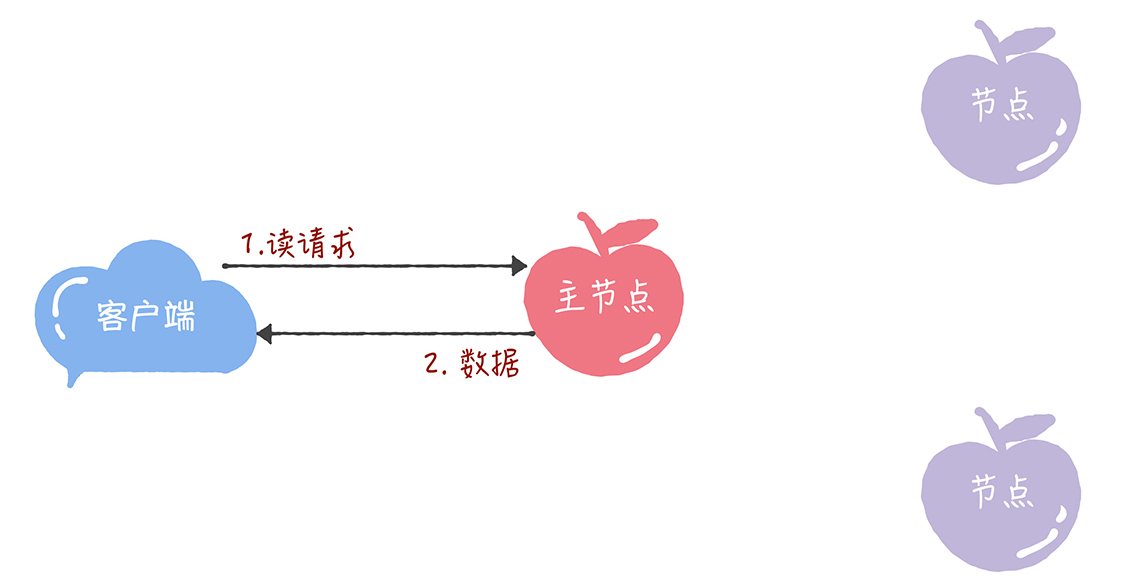
最后,我想补充一点:在Chubby中,为了实现了强一致性,读操作也只能在主节点上执行。 也就是说,只要数据写入成功,之后所有的客户端读到的数据都是一致的。具体的过程,就是下面的样子。
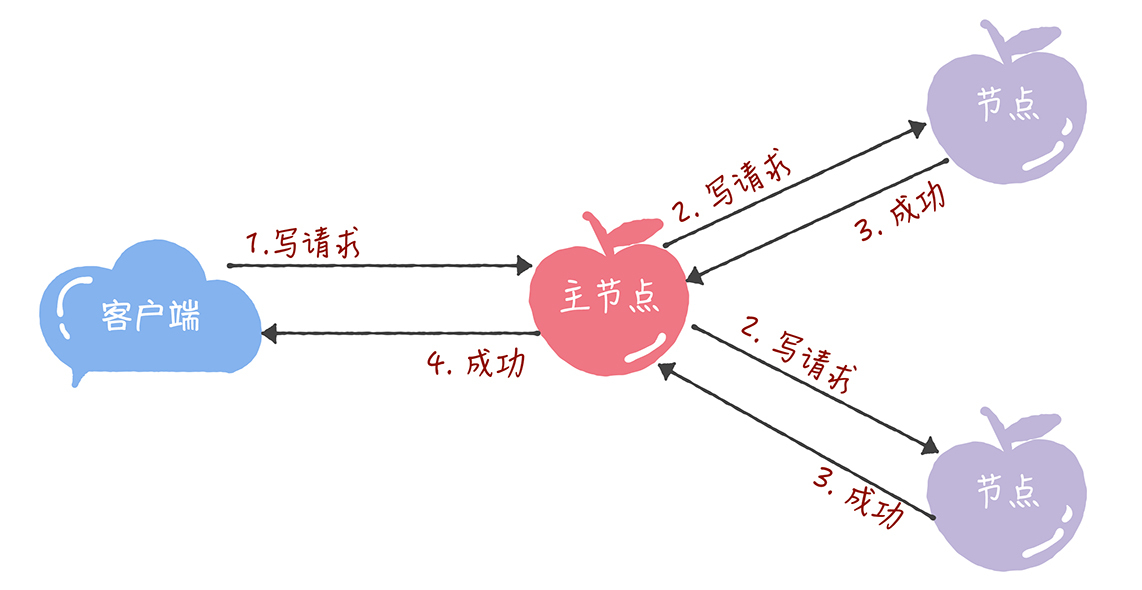
- 所有的读请求和写请求都由主节点来处理。当主节点从客户端接收到写请求后,作为提议者,执行Basic Paxos实例,将数据发送给所有的节点,并且在大多数的服务器接受了这个写请求之后,再响应给客户端成功:
- 当主节点接收到读请求后,处理就比较简单了,主节点只需要查询本地数据,然后返回给客户端就可以了:
Chubby的Multi-Paxos实现,尽管是一个闭源的实现,但这是Multi-Paxos思想在实际场景中的真正落地,Chubby团队不仅编程实现了理论,还探索了如何补充细节。其中的思考和设计非常具有参考价值,不仅能帮助我们理解Multi-Paxos思想,还能帮助我们理解其他的Multi-Paxos算法(比如Raft算法)。
内容小结
本节课我主要带你了解了Basic Paxos的局限,以及Chubby的Multi-Paxos实现。我希望你明确的重点如下:
- 兰伯特提到的Multi-Paxos是一种思想,不是算法,而且还缺少算法过程的细节和编程所必须的细节,比如如何选举领导者等,这也就导致了每个人实现的Multi-Paxos都不一样。而Multi-Paxos算法是一个统称,它是指基于Multi-Paxos思想,通过多个Basic Paxos实例实现一系列数据的共识的算法(比如Chubby的Multi-Paxos实现、Raft算法等)。
- Chubby实现了主节点(也就是兰伯特提到的领导者),也实现了兰伯特提到的 “当领导者处于稳定状态时,省掉准备阶段,直接进入接受阶段” 这个优化机制,省掉Basic Paxos的准备阶段,提升了数据的提交效率,但是所有写请求都在主节点处理,限制了集群处理写请求的并发能力,约等于单机。
- 因为在Chubby的Multi-Paxos实现中,也约定了“大多数原则”,也就是说,只要大多数节点正常运行时,集群就能正常工作,所以Chubby能容错(n - 1)/2个节点的故障。
- 本质上而言,“当领导者处于稳定状态时,省掉准备阶段,直接进入接受阶段”这个优化机制,是通过减少非必须的协商步骤来提升性能的。这种方法非常常用,也很有效。比如,Google设计的QUIC协议,是通过减少TCP、TLS的协商步骤,优化HTTPS性能。我希望你能掌握这种性能优化思路,后续在需要时,可以通过减少非必须的步骤,优化系统性能。
最后,我想说的是,我个人比较喜欢Paxos算法(兰伯特的Basic Paxos和Multi-Paxos),虽然Multi-Paxos缺失算法细节,但这反而给我们提供了思考空间,让我们可以反复思考和考据缺失的细节,比如在Multi-Paxos中到底需不需要选举领导者,再比如如何实现提案编号等等。
但我想强调,Basic Paxos是经过证明的,而Multi-Paxos是一种思想,缺失实现算法的必须编程细节,这就导致,Multi-Paxos的最终算法实现,是建立在一个未经证明的基础之上的,正确性是个问号。
与此同时,实现Multi-Paxos算法,最大的挑战是如何证明它是正确的。 比如Chubby的作者做了大量的测试,和运行一致性检测脚本,验证和观察系统的健壮性。在实际使用时,我不推荐你设计和实现新的Multi-Paxos算法,而是建议优先考虑Raft算法,因为Raft的正确性是经过证明的。当Raft算法不能满足需求时,你再考虑实现和优化Multi-Paxos算法。
课堂思考
既然,我提了Chubby只能在主节点上执行读操作,那么在最后,我给你留了一个思考题,这个设计有什么局限呢?欢迎在留言区分享你的看法,与我一同讨论。
最后,感谢你的阅读,如果这篇文章让你有所收获,也欢迎你将它分享给更多的朋友。
- HuaMax 👍(40) 💬(8)
“当领导者处于稳定状态时,省掉准备阶段,直接进入接受阶段”这个优化机制。 请问,什么样是稳定状态?为什么稳定状态可以省掉准备阶段?
2020-02-24 - 每天晒白牙 👍(24) 💬(11)
只能在主节点进行读操作,效果相当于单机,对吞吐量和性能有所影响 写也是在主节点进行,性能也有问题
2020-02-24 - Geek_MYMSwen 👍(19) 💬(6)
Chubby的局限可能在于高读的系统中,如果读请求过大,会导致系统的不可用。另外在系统中如何能够将主节点更替的信息向用户传播也是需要考虑的问题。 还有有一种情况我没有想清楚,请各位指点: 一个分布式系统中有5个节点,3个在一个机房A(机器编号A1,A2,A3),2个在另一个机房B(机器编号B1,B2)。 1)如果节点A1的机架网络发生故障,导致A1与其他节点通信受阻,那么A1节点将会执行什么操作呢?通讯恢复以后A1节点如何进行数据同步呢?同样在A1无法通讯后出现集群有偶数节点,选举时会出现怎样的情况? 2)如果主节点为B1,A机房与B机房间通讯产生故障,A机房和B机房的节点将分别执行怎样的操作呢?
2020-02-24 - 小石头 👍(9) 💬(5)
如果多个提议者同时提交提案,可能出现因为提案冲突,在准备阶段没有提议者接收到大多数准备响应,协商失败,需要重新协商。你想象一下,一个 5 节点的集群,如果 3 个节点作为提议者同时提案,就可能发生因为没有提议者接收大多数响应(比如 1 个提议者接收到 1 个准备响应,另外 2 个提议者分别接收到 2 个准备响应)而准备失败,需要重新协商。 这第一个问题理解不了,按上篇讲的,最大提议号的提议者不是会收到所有的准备响应么?
2020-03-22 - zjm_tmac 👍(9) 💬(1)
leader怎么确定acceptor的总数呢?集群是允许扩容的吗
2020-02-25 - snakorse 👍(7) 💬(5)
找到一篇微信后台团队对PhxPasox的讲解,感觉是对multi-paxos非常好的补充,推荐一下https://mp.weixin.qq.com/s?__biz=MzI4NDMyNTU2Mw==&mid=2247483695&idx=1&sn=91ea422913fc62579e020e941d1d059e&chksm=ebfc62fbdc8bebed551c2a041bb37bcaab836c4b2ca8e575d418f1e24459459c1c16faf70d06
2020-03-21 - eason2017 👍(6) 💬(2)
集群,分布式的意义是提供更大的吞吐量,和并发,这样的操作无疑是掩耳盗铃
2020-04-01 - 阿卡牛 👍(5) 💬(2)
主节点只一个?那存在单点故障的问题
2020-03-24 - cpzhao 👍(5) 💬(2)
咨询下,对于写请求,主节会发接受请求发给其余节点,只有其余节点过半操作成功才能返回成功给客户端。这里有个问题是,如果操作没有过半成功,比如6台机器只有两个写成功了,那主节点返回失败给客户端后,是不是还得考虑怎么让那两个写成功的回滚操作?大概可以怎么实现
2020-03-10 - 陈 👍(5) 💬(2)
只能在主节点读取,存在单机性能和容错问题。
2020-02-28 - Geek_zbvt62 👍(5) 💬(1)
本来想问个问题,看到思考题提到了。 从raft和zab的实现来看,一致性读操作的处理和写操作是类似的,不从本地读,而是也要发请求到所有节点,得到大多数节点的响应才行。我了解到的有的实现是领导者发送一个空操作给所有节点。 这样做的原因不光是考虑吞吐量的问题,而是读本地是满足不了强一致性的,因为自以为的leader未必是真的leader,此时可能另外的节点已经自己组成一个小团队,选出一个新leader,这个变量也可能都更新好几次了。只有和大多数节点交互一次才能知道自己当前还是不是leader。 有个问题,兰伯特提到的 “当领导者处于稳定状态时...”这个稳定状态是什么意思呢?在领导者是谁这个问题上,达成大多数节点的一致?
2020-02-24 - W.G.Ma 👍(4) 💬(5)
如果多个提议者同时提交提案,可能出现因为提案冲突,在准备阶段没有提议者接收到大多数准备响应,协商失败,需要重新协商——————为什么?三个提议者最大编号的的总能收到准备提议的回复
2020-03-26 - 笑若海 👍(4) 💬(2)
Chubby是如何解决单机leader的性能的:Chubby的角色定位是提供分布式锁服务,帮助其他应用达成分布式共识,内部存储的都是其他服务如GFS、MapReduce运行所需的元数据信息,数据结构采用类似linux文件系统的结构,每一级目录代表一定级别的锁。按照论文里面测试结果,97%(也可能是99%,记不太清了)以上的服务请求数据大小不超过1k,同时锁是有租约的,租约到期前不需要再发请求可以一直使用,快到期时发请求续租。论文中特别强调不要在Chubby上存储太大数据,有应用因存储1M大小的元数据而性能极差。 建议大家有空看看Chubby的论文。 另外论文提到了状态机,对状态机的有啥用,为了解决什么问题一直没想明白。
2020-02-28 - sai 👍(4) 💬(1)
您好,假设有3台节点 A, B, C. leader 最开始是A, 依次执行写入操作[set x=1, set y=2, set z=3], 假设B和C都有可能超时,根据paxos只需要大多数写入成功就算执行成功的原则,当前状态可能为A:[x:1, y:2, z:3], B:[x:1, z:3], C: [y2, z3]。如果这个时候主节点A宕机,如何重新选择主节点并恢复数据呢?
2020-02-24 - Sam 👍(3) 💬(1)
老师,能介绍一些关于这方面的书单吗?
2020-03-05